Proceedings of the 2015 Industrial and Systems Engineering Research Conference S. Cetinkaya and J. K. Ryan, eds.
Matthew Snead, David Holt, Michael Mullen, Michelle Londa, Tongdan Jin
Ingram School of Engineering
Texas State University
San Marcos, TX 78666, USA
Abstract
Public bus transportation is a vital service to all populated areas, and much of this service relies on structured driving routes. As buses move they consume large amounts of fossil fuels, impacting the environment and incurring operating costs. The goal of this paper is to propose a sustainable bus routing solution that minimizes the annual fuel consumption with guaranteed quality of services. The study is carried out based on a bus fleet that currently serves more than 34,000 students at a public university in Texas. Utilizing a wealth of historical data from the provider’s webpage, the locations of specific buses are able to be determine as they run on a route. In addition to onsite observations, run-time data are also retrieved from the web site through JavaScript Object Notation and fed into advanced statistical tools for real-time decision making. The base model is constructed within SIMIO, validated, and optimized using add-in functions to identify the most fuel-efficient bus route. The study shows that by synthesizing big data analytics with passengers’ arrival pattern, the fuel efficiency can be improved by 10-20 percent, potentially reducing 15 percent of operating cost and 24 thousand tons of carbon dioxide emissions per year.1. Introduction
In 2013 Americans took 10.7 billion trips on public transportation which was the highest annual ridership number in57 years. Public transportation is a $58 billion industry that employs nearly 400,000 people in 7,100 service organizations in the United States. Access to bus and rail lines reduce driving by 4,400 miles (1 mile=1.6 km) per household per year and save 450 million gallons of fuel annually nationwide along with reduced congestions [1]. As traffic continues to increase there is a constant upshift in demand for quality public transportation. A very versatile tool for this demand is the use of bus systems. These systems’ ability to adapt to new demands and flexibility of route adjustments make them more viable in comparison to other options that require costly and rigid infrastructures such as subways or rail systems. The advantage of handling the organic growth of densely populated areas is important in terms of maximizing the transportation performance through big data intelligence, advanced analytics, and information technology.
Minimizing the passengers’ wait time and lowering the operating cost are two basic criteria for assessing the bus service system. In order to schedule and decide how a bus route will be organized to provide optimal service depends on multiple factors including demand at locations, route schedules, fleet size, and support facilities. A main factor to consider in this equation is the carbon footprint left by buses and the expense associated with it. For example, the bus fleet under study uses diesel fuel and each bus consumes approximately 136 gallons in a 12 hour shift at a fuel cost of $3.05 per gallon. Based on the fact that burning one gallon of diesel generates 10.18 Kg CO2 [2], the daily carbon emission reaches as high as 1,384 Kg per bus. Moreover, the service cost to operate a bus per shift is roughly $1,012 which contributes to a cost of $1,425 per 12-hour shift per bus. This is why creating an optimal bus route and schedule is essential to minimizing the greenhouse gas emissions and operating cost.
Existing studies on bus routing and scheduling usually encompass analytical methods and field observations. Although there are many tools available, a well-known approach is the Bus Rapid Transit (BRT) planning guide [3]. The current version spans over 800 pages and includes contributions from a wide range of professionals and practitioners with direct experience in designing and implementing BRT systems all over the world. The guide provides planners with the ability to design and implement a bus route system. The methods used throughout the BRT are based on analytical models for traffic analysis and decision making. Some route implementation methods provide comparison charts based on advantages and disadvantages as a decision making tool; an example of this is the allocation of bus stops [4]. However, static bus routing methodologies could be inefficient or may result in large amounts of carbon emissions and added operation and maintenance costs due to the variable operating environment.
In contrast to the current approaches, this study integrates real-time bus operating data with advanced simulation tools (i.e. SIMIO) to generate possible improvements to a bus route system by taking into account the passengers’ variations. The baseline model constructed represents the current route in study and is used in the design of experiments as an approach for creating a greener and more cost-effective transportation system. Excel, Minitab, and JMP are applied in the handling and analysis of the data which are incorporated into SIMIO. OptQuest software is employed within SIMIO to generate and simulate configurations to the baseline and produce optimal solutions.
The remainder of the paper is organized as follows: Section 2 presents a general framework under which multiple data sources are synthesized and fed into SIMIO to create a simulation environment for routing decision. Section 3 carries out the initial data analysis and Section 4 performs an in-depth verification and validation of the simulation model. In Section 5, the architecture of the experiments and solution methodology are described. Section 6 is comprised of the proposed model to implement the real bus transit system along with projected CO2 and cost savings. Section 7 concludes the paper.
2. Methodology
2. 1 Approach
Informatics including real-time and historical data is utilized to help improve the efficiency of the current base routein study. As a result harmful pollutants and greenhouse gases entering the atmosphere are significantly reduced, and cost savings are also realized due to the reduction of total driving distance. Ten regular routes compose the basic bus system. In addition, there are four evening routes, four night routes, and five Saturday routes. Transdev, the bus contractor operates using a total of 45 buses, 43 of which are new. For the purpose of this study, the focus is on the Bobcat Village Route that operates using a maximum of three buses, yet the proposed method can be generalized and extended to other bus routes. As shown in Figure 1, the three buses all follow the same routing logic: the buses travel from Bobcat Village North to Bobcat Village South, Bobcat Village South to LBJ, LBJ to the Quad, and the Quad to Bobcat Village North and repeat this cycle for the entire duration of each day. The current route sequences and the daily schedule for the buses are also shown in Figure 1. Note that Matthews is not a stop and all stops in Bobcat Village are located at the same complex with 0.05 miles separation.
Bus Schedule |
||
Bus # |
Start (AM) |
End (PM) |
1 |
7:08 |
5:21 |
2 |
7:18 |
6:41 |
3 |
7:28 |
7:00 |
Distance Between Stops (mile) |
||
Quad-Bobcat Village North |
1.72 |
|
Bobcat Village N-South |
0.05 |
|
Bobcat Village S-LBJ |
2.13 |
|
|
LBJ-Quad |
0.53 |
Figure 1: Bus Route and Bus Schedule
2.2 Big Data Collection
During the summer of 2014, The Texas State Bus Service went through some significant upgrades with not only thebusses but also the way the busses are tracked. Using Apple iPads the busses send out a Global Positioning System (GPS) signal that is typical in most cell phones and tablet-type devices. The web managers are able to take that data and apply it to a map, giving the end user a real-time location of where a bus is on a particular route. The real-time data collected in this case study are retrieved from the raw links of the map using a JavaScript Object Notation. This enabled us to continuously retrieve real-time GPS data from the site and store daily information into an enormous text file containing more than 700,000 lines of raw data. The raw data lines contain information such as: route, bus identification, time, date, GPS recordings, and other information that was not directly utilized but handled. More than seven million cells generated by each file are brought into an analytical environment where they are later analyzed.
2.3 Supporting Data
Quantitative and qualitative data are collected by the methods described above. Using time-study practices,observational data are collected in the following categories: Arrival Time of Bus, Dwell Time of Bus, Inter-arrival time of Students in five minute increments, and time between Bobcat Village North and Bobcat Village South. All of the observational data is time stamped for correlation across data sources. Supplementary data is also provided by the Texas State Transportation Services upon request. This information is transferred to Excel where it is later interpreted and organized for usage of design and validation. The qualitative data is used during the design process and experimentation processes described below.
3. Initial Data Analysis
3.1 Big Data Analysis
The bulk data collected is datamined and all pertinent information is imported into Excel sheets where the GPS pointsand timestamps are used to calculate the travel times between adjacent stops. Using intervals of two hours, the GPS
time paths are arranged by the time of day to account for different traffic and environmental patterns.
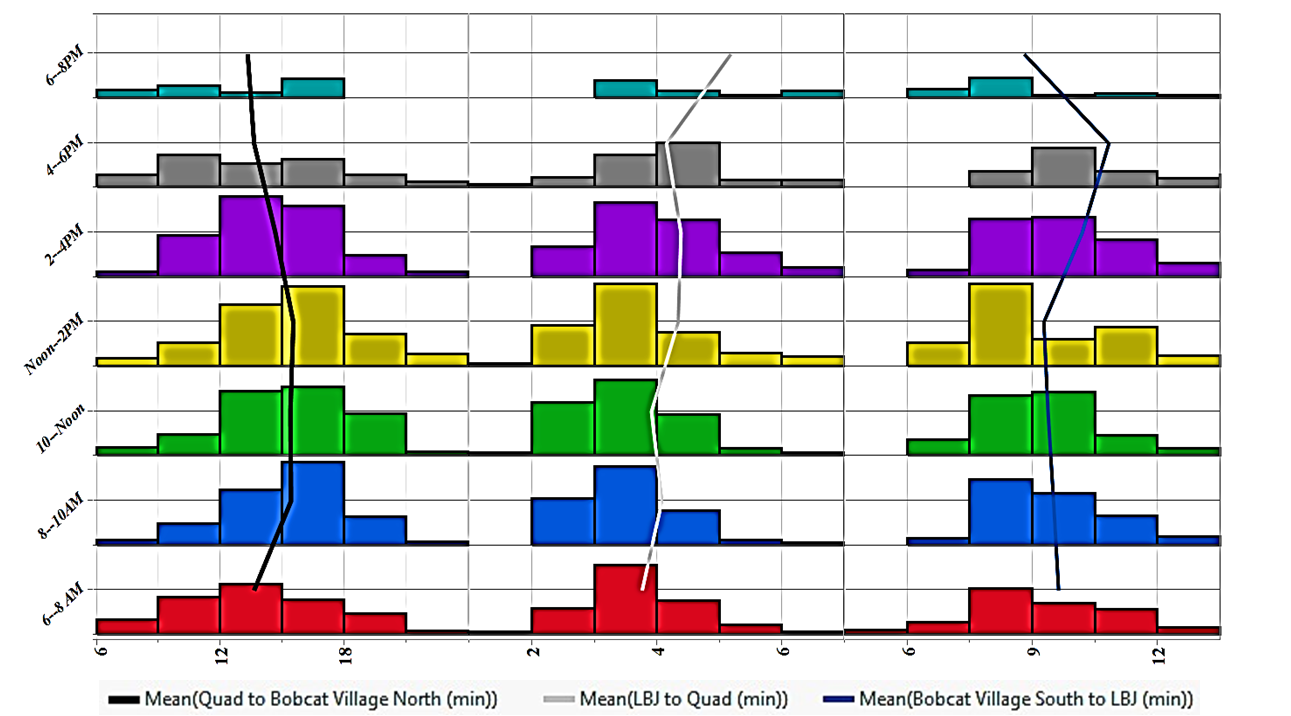
Figure 2: Travel Times (minutes) versus Time of Day
The data are analyzed using analytic tools within Excel, Minitab, and JMP to generate the appropriate distributions to be implemented into the simulation platform SIMIO. Figure 2 depicts the two-hour time interval versus the bus inter- arrival time between adjacent stops; it shows both spatial and temporal variations existing in the current route. The Bobcat Village North to Bobcat Village South times are not included in the above figure because the times were consistent due to a designated bus lane with no interruption for the 0.05 miles of spacing between stops. The interpreted data are implemented in an organized environment that stems from Markov process and queuing theory. SIMIO allows for a model to be run with many replications in order to achieve deliverables at a 95 percent confidence level.
3.2 Data Validation
The data and information provided by the transportation service, along with the collected data, are used to validate theGPS findings. The student arrival data are fed into Excel sheets in the same format as recorded which will later be utilized when designing the simulation model. The design approach for modeling the current bus system is determined by analyzing the data in an organized environment. All of the data collected and analyzed generates the ability to model the current system with an accurate and real-time representation of the existing Bobcat Village bus route based on the GPS data in conjunction with other sources. The data are utilized in scheduling, bus allocation, and other logic planning within the SIMIO environment. The qualitative data are interpreted and aid in the designing process to determine certain preferences to attribute to the route and additional constraints relating to the process.
4. SIMIO Methodology and Implementation
4.1 SIMIO Environment
SIMIO is designed to support the object-oriented simulation paradigm with large scale applications based on agent-based modeling. Objects can be created and stored in libraries and easily retrieved and shared. A generic object might be a machine, customer, bus, ship, or any other entity that might be encountered in systems. The objects in this study include buses, students, stops, and routes. A SIMIO model looks like the real system, and the model logic and animation is built as a single step. An object may be animated to reflect the changing state of the object which corresponds to the bus movements in this study. This type of discrete event simulation allows us to model the behavior of the complex system in study using a large amount of data collected. A simple viewing model has been constructed and presented in Figure 3 along with a replica model of San Marcos bus route using Google Earth, Google Sketch Up, Trimble 3D Warehouse, and SIMIO (not shown here).
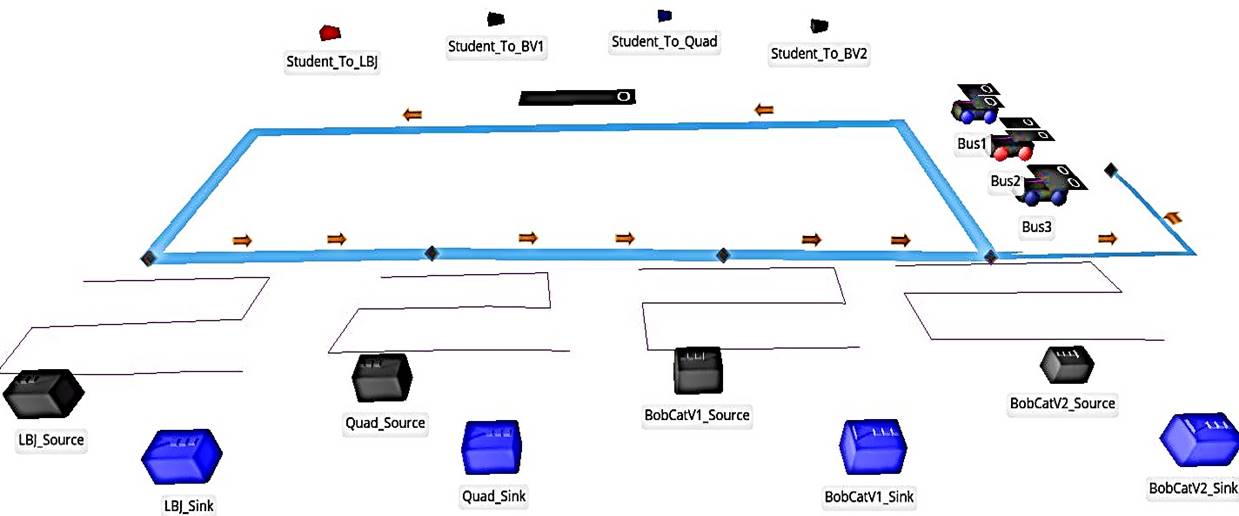
Figure 3: Simulation Model
The model runs Monday through Thursday from 6AM to 8PM with a one hour warm-up and cool-down period. Four types of entities representing students are created based on their destination: LBJ, Quad, Bobcat Village North, and Bobcat Village South. The entities enter and exit the model through ‘sources’ and ‘sinks,’ which collectively represent bus stops. The route system is connected using time paths mapped out based on the current route sequence. Buses enable entities to travel between stops on the route. Cost analysis is also implemented in the model for the buses based on the average fuel consumption rate and the hourly contracted operating cost. The model contains output statistics that are displayed during the simulation and generate real-time feedbacks for the overall cost, the individual cost per bus, and the number of passengers currently riding on a particular bus.
4.2 Entities
A rate table is created for each of the four bus stops. The rate units for the Poisson arrival process tables are arrivalsper hour. The rate is set using 156 intervals of five minutes. The time is based on the internal clock of the simulation. Every five minutes, a rate is given based on the number of events per hour. This rate is generated using the exponential distribution. For instance (see Table 1), the arrival time during 7:20:00 to 7:25:00 is exponentially distributed with a mean of 43.2 arrivals (i.e. events) per hour. When the source begins to create an entity, a separate table is referenced to determine the type of entity to create.
Table 1: Excerpt from a Bus Stop Arrival Table in the Morning of Day 1
Starting Time |
07:20:00 |
07:25:00 |
07:30:00 |
07:35:00 |
07:40:00 |
07:45:00 |
07:50:00 |
07:55:00 |
08:00:00 |
08:05:00 |
Ending Time |
07:25:00 |
07:30:00 |
07:35:00 |
07:40:00 |
07:45:00 |
07:50:00 |
07:55:00 |
08:00:00 |
08:05:00 |
08:10:00 |
Rate (events/hr) |
43.2 |
43.2 |
108 |
162 |
86.4 |
70.2 |
70.2 |
54 |
75.6 |
27 |
Table 2 illustrates the referenced table used by the sources when creating entities. This is read as a matrix where the source is called upon by the column and the probability of a particular student type is defined by the rows of the column. After the entity is created, a destination is assigned to the entity from the source based on the entity type. The entities then wait in the source’s output queues to be picked up by transporters.
![]()
![]() Table 2: Student Destination Probability
Table 2: Student Destination Probability
Student Type |
Probability of Student |
Probability of Student |
Probability of Student |
Probability of Student |
Student_To_LBJ |
0 |
0.005 |
0.8 |
0.8 |
Student_To_Quad |
0.005 |
0 |
0.2 |
0.2 |
Student_To_BV1 |
0.98 |
0.98 |
0 |
0 |
Student_To_BV2 |
0.015 |
0.015 |
0 |
0 |
Sum |
1 |
1 |
1 |
1 |
4.3 Transporters (Buses)
The Bobcat Village bus route uses three buses each having different start and end times (see Figure 1). The busesfollow the time paths between stops, which are set to evaluate the time within the simulation and therefore determine which distribution and values to use during a particular two-hour time interval. This allows the GPS data to be used in relation to the time of day to mimic traffic conditions. As entities are being picked up, the transporter must wait for the entities to load and unload. This is implemented using the random uniform function that is embedded in Minitab. The load time for each bus is randomly distributed between one and three seconds per entity. Each bus has the maximum seat capacity of 60 including the driver. For the model it is appropriate to choose 59 as the maximum bus capacity by excluding the driver’s seat.
4.4 Processes
An add-on trigger, execute step, or event can initiate a process. Processes are designed using different steps which arecarried out when launched. Processes are used throughout the simulation model to perform an array of logic.
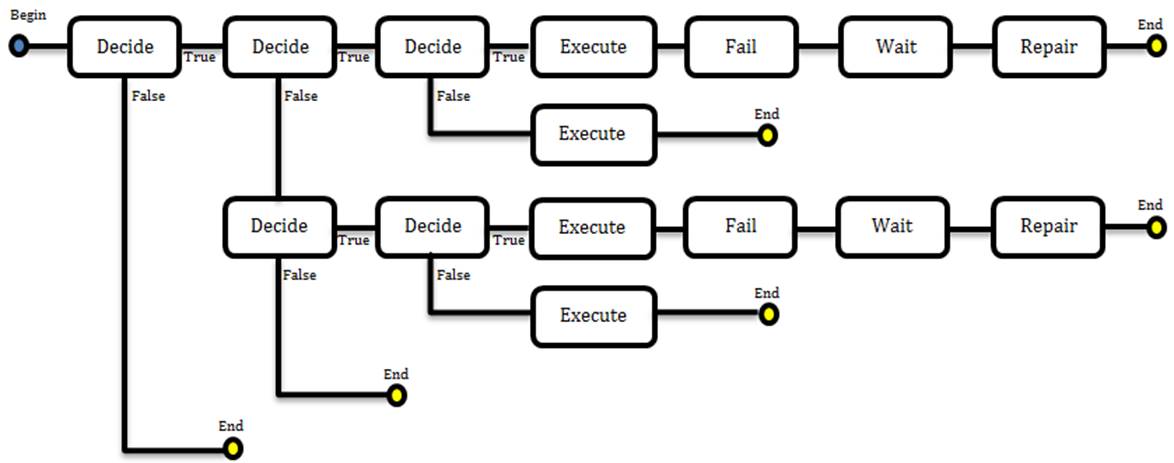
Figure 4: A Single Process in the Bus Travel Simulation Environment
Figure 4 depicts one of the 14 processes developed in the bus travel simulation environment. A process initialized at the beginning of the model evaluates when to allow a bus to start based on the controls. The finishing time for two buses is performed by a similar process. The third bus uses a process that allows the option for the bus to go off-shift during the day and then return on-shift until the finishing time. The bus operators attempt to keep a ten-minute spacing between each bus throughout the day. When a bus is ahead of the schedule it always dwells at the Quad. The spacing is created by using a separate entity, source, time path, and sink. When a bus leaves the assigned dwelling location it triggers a process which causes a source to create an entity that follows a time path with a default of ten minutes spacing. The following bus that enters the assigned dwelling location evaluates whether there is an entity on the time path, if so the bus dwells until the sink is triggered by the entity to perform a process which fires an event to release the bus. Many processes are used within the model including the majority of the logic responsible for the reference properties.
4.5 Reference Properties
Reference properties (controls) are defined within the model using similar methods of logic contained in this paper. As mentioned, start and end times for buses are user-controlled and set up by the processes. Additionally dwellingconfigurations and the option to remove a stop can be set with different combinations of the controls. The relationship between the controls and the baseline configuration is shown in Table 3. The current schedule is based on the internal simulation clock which runs for 14 hours from 6AM to 8PM. These controls will later be used in the experimentation process as a systematic approach to generating possible improvements to the route.
Table 3: Summary of Control Parameters
No. |
Control Parameter |
Baseline Configuration |
Variable Unit/State |
1 |
Dwelling Time |
10 |
minutes |
2 |
Bus 1 Start |
1.133 |
hours |
3 |
Bus 1 End |
11.35 |
hours |
4 |
Bus 2 Start |
1.3 |
hours |
5 |
Bus 2 End |
12.68 |
hours |
6 |
Bus 3 Morning Start |
1.467 |
hours |
7 |
Bus 3 Morning End |
0 |
hours |
8 |
Bus 3 Evening Start |
0 |
hours |
9 |
Bus 3 Evening End |
13 |
hours |
10 |
Removal of Bobcat Village South Stop |
1 |
1 = Do not remove |
11 |
Dwell at LBJ or Quad when on Campus |
1 |
1 = Quad, 0 = LBJ |
12 |
Dwell on Campus all day or Mornings at Bobcat |
1 |
1 = Campus all day |
4.6 Model Validation
The baseline configuration is replicated 200 times and tested against the data. SIMIO simulations provide a vast amount of output statistics for all the objects within the model that are used to validate the system. The manyreplications of the baseline scenario provides valuable data that are compared to the real-time observational data along with the data collected by the university transportation office. The expectations and the simulation results converge, which demonstrates the validity of the model and its representation of the real world system under study. Through utilizing this information, it is determined that solutions may be sought after using this model to design multiple
experiments and to identify a probable solution that leads to lower operating cost and less environmental impacts.
5. Experiments
5.1 Designing Experiments
The experiment is a multi-objective design where the average wait times are the most heavily weighted objectivefollowed by the maximum wait times and cost, respectively. Responses are defined using expressions that relate to each particular output statistic. The responses are defined to minimize the time or the cost and assigned an objective weight. The reference properties are the controls within the experiment that can be easily manipulated for generating alternative routing scenarios.
The responses are given minimum and maximum values with the increment in which a particular response value can change. Additionally, constraints are implemented by writing general expressions to prevent the optimization model from generating infeasible configurations. Optimal solutions are produced through the add-in software called OptQuest. A minimum of 35 replications and a maximum of 3,000 scenarios are set up in OptQuest in this experiment. The software generates and simulates scenarios using the controls and interprets responses before generating new scenarios. The historical data from each simulated scenario are used when spawning the new scenarios in an attempt to find possible solutions based on the objective function. OptQuest continues to duplicate the process until an optimal solution is found or the maximum amount of scenarios is simulated.
5.2 Conducting Experiments
OptQuest executes the experiment and performs up to 105,000 simulations based on the experiment design. Oncecompleted, the results are sorted using parameter settings for the response variables to eliminate scenarios that are outside of the objectives. The remaining scenarios are exported into another experiment for more replications to be compared with the baseline model. In the new experiment the design is simulated for 200 replications per scenario including the possible solutions and six configurations of the baseline with the same route schedule. For comparison purposes, the six configurations representing different scenarios are summarized as follows
1) Baseline
2) Baseline with LBJ dwelling
3) Baseline with Bobcat Village South removed
4) Baseline with stop removed and split dwelling for morning and evening
5) Baseline with stop removed and split dwelling where the evening dwelling occurs at LBJ
6) Baseline with split dwelling
Next the results of the new experiment are investigated further to select possible improvements based on the greater replicated scenarios for data accuracy.
5.3 Analysis of Experiments
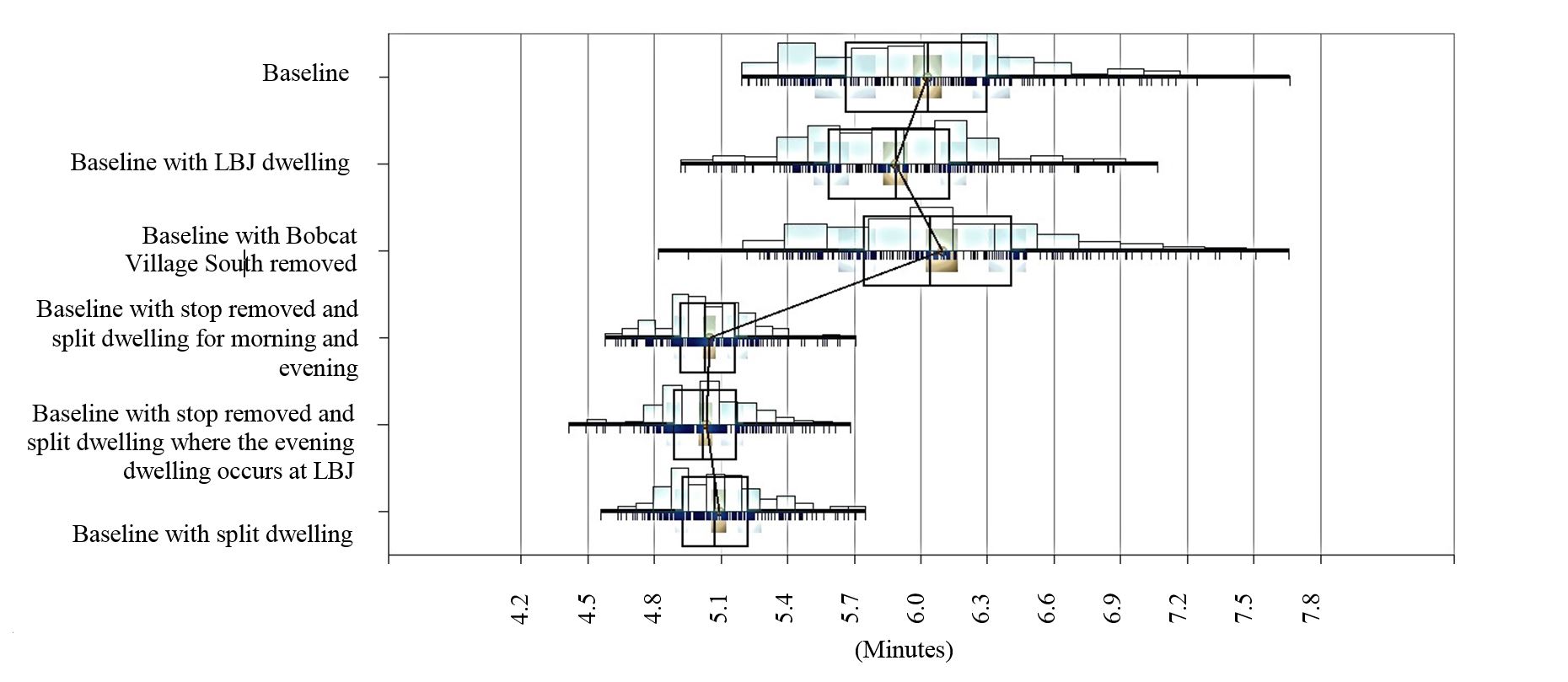
Figure 5: Results of the Six Baseline Scenarios in Bobcat Village North for Average Wait Time
The scenarios that are inferior to the route and required service (regarding the maximum and average wait times) are eliminated using ‘less than’ functions in the experiment. Then the comparison of configurations and responses are further analyzed for selecting runs that outperform other possible solutions. Plots are produced within SIMIO to determine the quality of each scenario. The plots are based on the Measure of Risk and Error (MORE) plots developed by Barry Nelson [7] and SIMIO labels SMORE [8]. The plots display enhanced box plots, histograms, and dot plots based on desired responses and selected scenarios. Figure 5 gives an example of a SMORE plot for Bobcat Village North average wait time versus the six configurations of the baseline. The software allows for all of the response variables to be plotted in this manner for comparison. The selected possible solution scenarios that yield large variations or outliers are removed. The final solutions are determined based on the quality of the output statistics. Though a large amount of feasible solutions exist, many are eliminated based on the comparisons and preferences inferred from the qualitative and quantitative data.
6. Results and Recommendations
By using certain configurations of scheduling, removal of a stop, and bus dwelling practices, the route can expectlarge cost reduction and carbon savings while still providing quality services to the students (see Tables 4-6).
Table 4: Response Results (Unit of Time is Minutes)
Scenario |
Replications |
Total Cost |
Max Time an |
Max Time an |
Max Time an |
Max Time an |
Average Wait Time LBJ |
Average Wait Time Quad |
Average Wait Time BV1 |
Average Wait Time BV2 |
Baseline |
200 |
$ 4,018.25 |
21.09 |
19.36 |
20.28 |
19.47 |
6.33 |
5.48 |
5.93 |
6.88 |
Baseline with LBJ Dwell |
200 |
$ 4,015.54 |
17.39 |
19.85 |
19.75 |
20.75 |
5.23 |
5.62 |
6.03 |
6.81 |
Baseline with Bobcat Village South Stop |
200 |
$ 4,020.18 |
21.52 |
19.05 |
0.00 |
20.55 |
6.40 |
5.46 |
5.94 |
0.00 |
Baseline with Stop Removed and Split |
200 |
$ 4,014.04 |
20.96 |
19.62 |
0.00 |
19.47 |
6.03 |
5.64 |
5.03 |
0.00 |
Baseline with Stop Removed and Split |
200 |
$ 4,017.12 |
17.91 |
19.88 |
0.00 |
20.59 |
5.27 |
5.66 |
5.05 |
0.00 |
Baseline with Split Dwelling |
200 |
$ 4,018.61 |
21.06 |
19.45 |
15.28 |
19.87 |
6.05 |
5.64 |
5.05 |
5.48 |
Possible_SolA |
200 |
$ 3,433.50 |
21.12 |
23.36 |
0.00 |
23.93 |
6.08 |
6.36 |
6.47 |
0.00 |
Possible_SolB |
200 |
$ 3,438.85 |
23.92 |
24.51 |
0.00 |
25.22 |
5.87 |
6.22 |
6.46 |
0.00 |
Possible_SolC |
200 |
$ 3,665.73 |
20.13 |
21.13 |
0.00 |
23.63 |
5.67 |
5.99 |
6.23 |
0.00 |
Possible_SolD |
200 |
$ 3,600.87 |
19.50 |
20.91 |
0.00 |
23.31 |
5.61 |
5.92 |
6.49 |
0.00 |
Possible_SolE |
200 |
$ 3,557.89 |
21.17 |
22.93 |
0.00 |
24.25 |
5.60 |
5.97 |
6.38 |
0.00 |
Possible_SolF |
200 |
$ 3,618.50 |
20.31 |
21.91 |
0.00 |
23.55 |
5.59 |
5.96 |
6.32 |
0.00 |
Possible_SolG |
200 |
$ 3,489.03 |
19.56 |
21.09 |
0.00 |
23.76 |
5.86 |
6.24 |
6.73 |
0.00 |
Possible_SolH |
200 |
$ 3,737.30 |
19.93 |
20.87 |
0.00 |
23.46 |
5.49 |
5.78 |
6.27 |
0.00 |
Possible_SolI |
200 |
$ 3,678.95 |
19.10 |
20.52 |
0.00 |
22.93 |
5.83 |
6.24 |
6.27 |
0.00 |
Possible_SolJ |
200 |
$ 3,537.48 |
21.00 |
22.94 |
0.00 |
23.83 |
5.73 |
6.03 |
6.29 |
0.00 |
Possible_SolK |
200 |
$ 3,626.96 |
20.14 |
21.47 |
0.00 |
23.05 |
5.65 |
5.93 |
6.24 |
0.00 |
Possible_SolL |
200 |
$ 3,343.15 |
23.00 |
25.03 |
0.00 |
25.90 |
5.99 |
6.40 |
6.70 |
0.00 |
Possible_SolM |
200 |
$ 3,561.16 |
19.77 |
20.85 |
0.00 |
23.64 |
5.72 |
5.97 |
6.36 |
0.00 |
Possible_SolN |
200 |
$ 3,342.75 |
21.59 |
23.35 |
0.00 |
24.67 |
6.23 |
7.16 |
6.69 |
0.00 |
Possible_SolO |
200 |
$ 3,581.57 |
19.73 |
20.96 |
0.00 |
23.51 |
5.59 |
5.97 |
6.42 |
0.00 |
Possible_SolP |
200 |
$ 3,411.88 |
20.91 |
22.09 |
0.00 |
23.88 |
6.05 |
6.27 |
6.77 |
0.00 |
Possible_SolQ |
200 |
$ 3,342.75 |
21.59 |
23.35 |
0.00 |
24.67 |
6.23 |
7.16 |
6.69 |
0.00 |
Possible_SolR |
200 |
$ 3,343.15 |
23.00 |
25.03 |
0.00 |
25.90 |
5.99 |
6.40 |
6.70 |
0.00 |
Possible_SolS |
200 |
$ 3,489.03 |
19.56 |
21.09 |
0.00 |
23.76 |
5.86 |
6.24 |
6.73 |
0.00 |
Possible_SolT |
200 |
$ 3,411.88 |
20.91 |
22.09 |
0.00 |
23.88 |
6.05 |
6.27 |
6.77 |
0.00 |
Possible_SolU |
200 |
$ 3,340.12 |
25.43 |
26.42 |
0.00 |
27.10 |
6.02 |
6.59 |
6.79 |
0.00 |
Possible_SolV |
200 |
$ 3,417.05 |
21.22 |
23.00 |
0.00 |
24.38 |
6.03 |
6.78 |
6.93 |
0.00 |
Possible_SolW |
200 |
$ 3,414.13 |
19.94 |
21.61 |
0.00 |
24.09 |
6.10 |
6.57 |
6.96 |
0.00 |
Possible_SolX |
200 |
$ 3,253.96 |
26.87 |
27.47 |
0.00 |
27.74 |
6.39 |
6.91 |
7.41 |
0.00 |
6.1 Cost Reduction
The SMORE chart for the cost scenarios demonstrate that the calculated costs from the replications can be consideredas valid (see Figure 6). The scenarios present many sound solutions with a wide range of possible savings. Table 5 shows the projected cost savings based on a pessimistic, realistic, and optimistic scenario. The expected cost savings range between 10-20%. For instance, the pessimistic scenario shows that up to $400 per bus per day could be saved while the optimistic solution shows that the saving could reach as high as $800. Even under the pessimistic condition, the annual saving can reach $420,000 a year, which lowers the current cost by ten percent.
Table 5: Projected Cost Reduction
|
Scenario 1: Pessimistic |
Scenario 2: Realistic |
Scenario 3: Optimistic |
Estimated savings for one bus route per day |
$400 |
$600 |
$800 |
Number of routes out of 17 that will have savings |
5 |
9 |
12 |
Days per week |
5 |
5 |
5 |
Total weeks in service per year |
42 |
42 |
42 |
1-Year Savings |
$420,000 |
$1,134,000 |
$2,016,000 |
5-Year Savings |
$2,100,000 |
$5,670,000 |
$10,080,000 |
10-Year Savings |
$4,200,000 |
$11,340,000 |
$20,160,000 |
Cost Savings (%) |
10% |
15% |
20% |
Calculated Cost ($)
 Figure 6: SMORE Cost Results
Figure 6: SMORE Cost Results
6.2 Carbon Savings
The reduction of the travel distance not only benefits the reduction of operating cost, but it also saves the environmentalprice tag. In combination with other controls, the projected carbon savings are based on the same scenarios as described in Section 6.1 and presented in Table 6. The estimated CO2 savings falls between 10-23%. The resulting aggregate can amount to as much as 11,556 Kg of carbon savings per day or nearly 24 thousand tons of carbon emission avoidance per year.
Table 6: Projected CO2 Savings
|
Scenario 1: Pessimistic |
Scenario 2: Realistic |
Scenario 3: Optimistic |
Fuel savings per Day (gallons) |
199 |
538 |
1,135 |
1 Year |
41,823 |
112,922 |
238,390 |
5 Years |
209,114 |
564,608 |
1,191,949 |
10 Years |
418,228 |
1,129,215 |
2,383,899 |
Carbon savings per day (Kg) |
2,027 |
5,474 |
11,556 |
1 Year |
425,756 |
1,149,541 |
2,426,809 |
5 Years |
2,128,780 |
5,747,705 |
12,134,045 |
10 Years |
4,257,559 |
11,495,411 |
24,268,089 |
Total Savings |
10% |
15% |
23.5% |
6.3 Recommendations
Based on the simulation result, the bus service can be improved by implementing one or more of the followingrecommendations: 1) removing the Bobcat Village Stop South; 2) reassigning dwelling to Bobcat Village North until
9:30AM; and 3) continuing to LBJ for the remainder of the day. Furthermore, altering the scheduling of the buses can result in a significant amount of cost reduction and carbon savings. Although many solutions can be implemented, the proposed solution (see Table 7) provides the desired service yet greatly reduces the operating budget and environmental impacts. The purpose falls between the realistic and optimistic scenarios at over $600 savings (see Tables 5 and 6), which leads to more than 15 % savings in both carbon emissions and operating cost.
Table 7: Purposed Solution to Control Parameters and Variables
No. |
Control Parameters |
Proposed Configuration |
Variable Unit/State |
1 |
Dwelling Time |
10 |
minutes |
2 |
Bus 1 Start |
1.13 |
hours |
3 |
Bus 1 End |
11.40 |
hours |
4 |
Bus 2 Start |
1.51 |
hours |
5 |
Bus 2 End |
12.25 |
hours |
6 |
Bus 3 Morning Start |
1.92 |
hours |
7 |
Bus 3 Morning End |
4.75 |
hours |
8 |
Bus 3 Evening Start |
8.67 |
hours |
9 |
Bus 3 Evening End |
13 |
hours |
10 |
Removal of Bobcat Village South Stop |
0 |
1 = Do not remove 0 = Remove |
11 |
Dwell at LBJ or Quad when on Campus |
0 |
1 = Quad, 0 = LBJ |
12 |
Dwell on Campus all day or Mornings at Bobcat Village and Evenings on Campus |
0 |
1 = Campus all day |
7. Conclusion
This research aims at pursuing a sustainable bus service system using real-time big data informatics to reduce the operating cost and the fuel consumptions without compromising the quality of service. Due to the dynamic operating condition, static bus routing methodologies can be inefficient and result in large amounts of carbon emissions along with added operation and maintenance costs. This case study demonstrates that fusing the real-time GPS data with available travel information can create an accurate simulation model that enables the planner to optimize the time path and the physical route. Unlike static routing optimization, the data-driven model can evolve with the changing characteristics of a route and further spawn an adaptive solution within an uncertain environment. The proposed model and the simulation approach can be easily implemented using off-the-shelf software. The study is now in the phase of possibly implementing a solution in the university bus transportation system based on the preliminary findings. The suggested route configuration is calculated to result in 11.3 to 20.2 million dollars in cost savings over ten years with an additional reduction of 11.4 to 24.3 thousand tons of the carbon footprint. For future research, this study will extend and generalize the simulation model in efforts to promote big data analytics in conjunction with current transportation systems to greatly reduce harmful polluting gas and cost.Acknowledgement
A special thanks to Steven Herrera, Stephanie Daniels, and Alex Vogt with the Texas State Transportation Serviceswho provided essential data and insight into the bus route. Also to Phillip Bateman for assistance with data collection and to Jacob Warren for providing the web links to the raw data and directing us towards using a JSON. As well as Rick Swan for creating the JSON and storing the data. This research is supported in part by the USDA under grant #
2011-38422-30803.