Le défi
par Paolo Scala et Miguel Mujica (Université des sciences appliquées d'Amsterdam) et Daniel Delahaye (École nationale de l'aviation civile)
Tel que présenté à la Conférence d'hiver sur la simulation 2017
Cet article traite de l'amélioration de la robustesse des solutions heuristiques pour les systèmes d'aviation affectés par l'incertitude lorsque la résolution des conflits est mise en œuvre. Un cadre comprenant l'utilisation de l'optimisation et de la simulation est décrit, qui génère à son tour des horaires pseudo-optimaux. La solution initiale est progressivement améliorée par l'évaluation itérative de l'incertitude dans les solutions générées et le calibrage conformément à la fonction objective. La simulation est utilisée pour tester la faisabilité d'une solution générée par un algorithme d'optimisation dans un environnement caractérisé par l'incertitude. Les résultats montrent que la méthodologie est capable d'améliorer les solutions pour les scénarios avec incertitude, ce qui en fait d'excellents candidats pour être mis en œuvre dans des environnements réels.
Introduction
Les systèmes aéroportuaires sont considérés comme des infrastructures critiques qui favorisent la connectivité, la valeur pour la région et sont essentiels pour encourager l'interaction mondiale entre différents pays, industries et personnes. C'est pourquoi la croissance attendue est une menace pour les installations actuelles et il ne devrait pas être souhaitable de limiter la croissance par les limites techniques des installations. En outre, l'aéroport est un ensemble d'éléments et de processus qui nécessitent des outils appropriés pour les gérer efficacement. Les opérations aéroportuaires peuvent être distinguées en opérations côté ville et opérations côté piste, les opérations côté ville étant celles qui se déroulent à l'intérieur des terminaux, et les opérations côté piste étant celles qui se déroulent à l'extérieur des terminaux. En ce qui concerne les opérations côté ville, il est possible d'identifier les passagers comme des entités et les comptoirs d'enregistrement, les portes d'embarquement ou même les lieux de loisirs tels que les magasins et les cafés comme des ressources. En ce qui concerne les opérations côté piste, les avions peuvent être identifiés comme des entités, et la manutention au sol, les pistes, les voies de circulation, les secteurs de l'espace aérien, pour n'en citer que quelques-uns, comme des ressources. Cette classification permet donc de constater que, dans le système aéroportuaire, deux sous-systèmes sont identifiés, très différents l'un de l'autre et régis par des dynamiques et des logiques complètement différentes. En outre, ces deux sous-systèmes différents interagissent l'un avec l'autre et affectent leurs performances respectives. Ainsi, les caractéristiques d'un système aéroportuaire, telles qu'elles ont été décrites précédemment, sont conformes à la définition des systèmes complexes donnée au début de cette section et, par conséquent, les systèmes aéroportuaires doivent être considérés comme des systèmes complexes lorsqu'ils sont analysés. Un autre élément qui caractérise les systèmes aéronautiques est leur caractère stochastique. Les systèmes aéronautiques sont par nature stochastiques et, pour cette raison, la simulation est une technique clé pour obtenir les informations nécessaires afin d'accroître la prévisibilité. En outre, l'aviation dépend fortement des calendriers, ce qui rend leurs problèmes susceptibles d'être améliorés par l'utilisation de techniques d'optimisation. Cependant, les praticiens ont reconnu que les techniques d'optimisation seules sont insuffisantes lorsqu'elles sont utilisées pour résoudre des problèmes de capacité (Scala, Mujica, et Delahaye 2016). Dans ce contexte, un concept fondamental qui doit être pris en compte est la robustesse de la solution provenant des modèles d'optimisation. En raison de la variabilité du système, une solution fournie par un modèle d'optimisation peut couvrir plusieurs scénarios avec incertitude, de sorte qu'une solution est définie comme robuste si elle peut être appliquée à des scénarios plus incertains sans changements majeurs dans la performance.
Dans la littérature, il existe de nombreux travaux liés à la robustesse des solutions pour les problèmes d'aviation, le résultat de ces travaux est le développement de nombreux outils et méthodologies. Chandran et Balakrishnan (2007) ont proposé un algorithme de programmation dynamique pour une planification robuste des pistes. Dans leur travail, ils ont pris en compte les incertitudes dans les heures d'arrivée des avions, en trouvant un compromis entre le débit de la piste et la probabilité de violer le minimum de séparation sur la piste comme objectif. Kim et Feron (2011) ont abordé le problème de l'affectation robuste des portes d'embarquement lorsque des retards stochastiques sont introduits. Ils ont défini la robustesse comme l'intervalle de temps entre deux avions qui se garent à la même porte d'embarquement, de sorte que plus l'intervalle est grand, plus la solution est robuste. Ils ont calculé le nombre et le niveau des affectations perturbées et ont résolu le problème à l'aide d'un modèle d'optimisation linéaire mixte 0-1 et de la méta heuristique de recherche taboue, montrant une amélioration, par rapport au calendrier original, du nombre et du niveau des affectations perturbées de 92 % et 95 %, respectivement. Dans le travail d'Arias, Guimarans, Mujica et Boosten (2013), le problème stochastique de récupération d'avions est résolu en employant le paradigme de la programmation par contraintes en combinaison avec des techniques de simulation, la robustesse des solutions est évaluée en comparant l'écart-type obtenu à partir des résultats simulés avec la variation de la distribution probabiliste utilisée pour générer des retards stochastiques, et sa propagation attendue en raison de la taille du problème. Dans sa thèse de doctorat, Lee (2014) s'est attaqué au problème de l'encombrement des surfaces aéroportuaires. Dans son travail, il a utilisé l'optimisation pour programmer les opérations sur les pistes et les voies de circulation, puis la simulation stochastique pour traiter les incertitudes. Narciso et Piera (2015) ont étudié le problème de l'affectation robuste des portes d'embarquement en proposant un modèle causal utilisant le formalisme des réseaux de Petri colorés (CPN) pour obtenir le nombre minimum de portes d'embarquement nécessaire pour absorber le trafic.
Cet article se concentre sur l'amélioration de la robustesse, telle qu'elle a été définie précédemment, pour les solutions provenant de modèles d'optimisation résolus par des méta heuristiques. La méthodologie est itérative et vise à trouver les solutions qui s'adaptent le mieux à un système affecté par des incertitudes. Cet article présente une application de cette méthodologie au problème de la détection et de la résolution des conflits dans les aéroports. Les résultats confirment qu'après deux itérations, en changeant les paramètres de l'algorithme mis en œuvre pour résoudre ce problème, il est possible d'obtenir une amélioration de la solution initiale. Le document est organisé comme suit : dans la section 2, le problème abordé dans ce document est décrit, puis dans la section 3, la méthodologie est présentée avec la description de l'optimisation et du modèle de simulation. La section 4 montre la mise en œuvre de la méthodologie appliquée au problème de la détection et de la résolution des conflits aéroportuaires et, dans la même section, les résultats sont montrés et discutés. Dans la dernière section, les conclusions et les travaux futurs sont présentés.
Description du problème
De nos jours, de nombreux aéroports européens sont à la limite de leur capacité, ce qui peut être attribué à la croissance rapide du trafic aérien au cours des dernières années. En outre, une croissance du trafic aérien a été prévue (Airbus 2016) pour les années à venir. Par conséquent, dans un scénario futur de congestion potentielle, des solutions doivent être apportées pour surmonter ce problème. La congestion aéroportuaire est identifiée surtout à l'intérieur de l'espace aérien de l'aire de manœuvre du terminal (TMA) et au sol à proximité de l'entrée de la piste. La TMA est une portion de l'espace aérien qui entoure les aéroports, où le flux des avions qui atterrissent converge vers le côté aérien de l'aéroport. Une bonne gestion des arrivées et des départs par les contrôleurs aériens peut soulager l'aéroport, l'espace aérien et le sol, des situations de congestion potentielles et en même temps augmenter le débit de la piste (Frankovich 2012). Le problème de la détection et de la résolution des conflits aéroportuaires, qui a été examiné dans le présent document, se réfère à l'ordonnancement du flux d'atterrissage des aéronefs et à la gestion de la capacité au sol. Dans ce problème spécifique, les conflits sont détectés dans l'espace aérien en raison des restrictions des minima de séparation, et au sol en raison des surcharges de capacité. Les sections suivantes décrivent plus en détail les conflits dans l'espace aérien, sur les pistes et au sol. L'objectif de la résolution de ce problème est d'assurer la sécurité des flux d'aéronefs dans l'espace aérien en réduisant à zéro les conflits dans l'espace aérien et en réduisant les surcharges de capacité au sol. Pour de plus amples informations sur ce problème, veuillez vous référer à Ma, Delahaye et Sbihi (2016).
Conflits d'espace aérien et de pistes
En ce qui concerne l'espace aérien, étant donné quelques routes d'atterrissage fusionnant en un point final (point d'approche initial - IAF) (voir Figure 1), et un ensemble d'aéronefs à l'atterrissage, l'objectif principal est d'établir la séquence des aéronefs de manière à ce qu'ils fusionnent à l'IAF sans enfreindre les minima d'espacement. En ce qui concerne les pistes, les conflits sont détectés lorsque la séparation entre deux avions consécutifs qui traversent la piste est inférieure aux minima de séparation requis. Les valeurs des minima de séparation sont fixées en fonction des différentes opérations sur la piste, qui peuvent être des arrivées (entrée de piste) ou des départs (sortie de piste), et elles sont basées sur la catégorie de turbulence de sillage de l'aéronef de tête et de l'aéronef de queue. Les minima de séparation pour l'espace aérien sont fournis par les normes de l'OACI (OACI 2007) et les minima de séparation pour la piste sont tirés de Frankovich (2012).

Conflits au sol
En ce qui concerne les opérations au sol, le modèle développé est un modèle de haut niveau, ce qui signifie que les opérations au sol ne sont pas modélisées en détail. Ainsi, les principales composantes du sol sont d'abord identifiées, puis une capacité est attribuée à chacune d'entre elles. Les principales composantes au sol identifiées sont les voies de circulation et les terminaux. La capacité est définie comme le nombre d'avions qui utilisent simultanément l'un des éléments. Une fois que les avions ont atterri et sont sortis de la piste, ils traversent la voie de circulation jusqu'à ce qu'ils se garent à la porte d'embarquement. Comme indiqué précédemment, le modèle du sol est un modèle de haut niveau, ce qui signifie que les voies de circulation n'ont pas été examinées en détail, et que les opérations sur les voies de circulation ont donc été modélisées en utilisant le temps de déplacement moyen. Les temps de rotation ont été basés sur un horaire réel, et le temps de déplacement sur la voie de circulation entre la porte d'embarquement et l'entrée sur la piste de départ a été pris en compte en utilisant le temps de déplacement moyen. L'objectif est de ne pas dépasser la capacité de ces composants, les conflits étant représentés dans ce cas par la somme de la surcharge de capacité maximale et de la surcharge de capacité moyenne. Le tableau 1 indique la capacité des principales composantes terrestres liées à l'exemple considéré dans ce travail.
Tableau 1 : Capacité de la principale composante au sol.
| Composante du sol | Capacité |
| Réseau de voies de circulation | 18 |
| Terminal 1 | 11 |
| Terminal 2 | 91 |
| Terminal 3 | 57 |
La solution
Le cadre
Le cadre qui sera présenté dans cette section sera la combinaison d'un modèle d'optimisation basé sur une fenêtre coulissante et d'un modèle basé sur une simulation d'événements discrets afin d'atteindre l'objectif susmentionné. Dans la suite de cette section, la structure de la méthodologie sera présentée, puis le processus d'optimisation et l'environnement de simulation seront décrits plus en détail.
Description de la méthodologie
La méthodologie proposée dans le présent document peut être représentée par deux étapes principales, comme le montre la figure 2. Dans la première étape, le système étudié est soumis à un processus d'optimisation dans le but d'obtenir des solutions optimales ou sous-optimales en fonction d'un objectif spécifique. Dans le présent document, cette méthodologie est appliquée au problème de la détection et de la résolution des conflits dans les aéroports, l'objectif de l'étude étant de parvenir à un scénario sans conflit. Sachant que le processus d'optimisation conduit à une solution exacte, où la plupart des paramètres opérationnels sont déterministes, il est probable que cette solution, lorsqu'elle sera testée dans un environnement réel, sera sensible à de légères modifications dues à la variabilité du système. Dans la deuxième étape de la méthodologie, la simulation est utilisée pour introduire la variabilité du système et pour tester la robustesse de la solution fournie par le processus d'optimisation. Dans l'environnement de simulation, certains paramètres pertinents qui affectent la solution dans la réalité sont autorisés à avoir des valeurs incertaines. Cette méthodologie est itérative, ce qui signifie que ces deux étapes seront appliquées tant que la robustesse sera améliorée selon un certain niveau de satisfaction, qui représente la condition d'arrêt du processus itératif. Dans ce travail, la robustesse est mesurée comme l'écart entre la performance de la solution simulée et le scénario idéal, où la performance est évaluée en nombre de conflits et le scénario idéal est une solution qui donne zéro conflit. Dans ce contexte, la robustesse est améliorée lorsque cet écart est minimisé.

Processus d'optimisation
Le processus d'optimisation qui a été appliqué dans cette méthodologie, et plus particulièrement pour le problème de détection et de résolution des conflits dans les aéroports, est basé sur une approche par fenêtre coulissante. Les principaux avantages de cette méthode sont que les sous-problèmes sont plus faciles à résoudre et nécessitent moins de temps de calcul ; en outre, elle aborde le problème de manière dynamique en mettant à jour les variables de décision pendant que la fenêtre glisse le long de l'horizon temporel, ce qui se traduit par une amélioration de la qualité de la solution. Cette approche a déjà été utilisée dans des problèmes similaires et a donné de bons résultats (Hu et Chen 2005, Zhan, Zhang, Li, Liu, Kwok, Ip et Kaynak 2010, Furini, Kidd, Persiani et Toth 2015, Toratani, Ueno et Higuchi 2015, Man, Delahaye et Xiao-hao 2015, Ma, Delahaye, Sbihi et Mongeau 2016). Dans cette approche, chaque entité (avion) est associée à un certain statut en fonction de sa position par rapport à la fenêtre actuelle. Par conséquent, le statut d'une entité peut êtrecompletsi elle est en dehors de la fenêtre actuelle ;en courssi l'entité est entre la fenêtre précédente et la fenêtre actuelle ;actifsi l'entité est à l'intérieur de la fenêtre actuelle ;planifiési l'entité est dans la fenêtre suivante. Dans la fenêtre actuelle, les décisions ne seront prises que pour les entités en cours et actives, tandis que pour les entités achevées, elles ont déjà été prises. En ce qui concerne les entités planifiées, les décisions seront prises dans la fenêtre suivante (voir figure 3).
Les principaux paramètres de l'approche par fenêtre coulissante sont la taille de la fenêtre et la taille du décalage, qui affectent les performances du processus d'optimisation en termes de temps de calcul et de qualité de la solution ; il est donc crucial de définir ces deux paramètres avec des valeurs adéquates afin d'obtenir de bonnes solutions. Une petite fenêtre permettra de résoudre de petits sous-problèmes, mais certaines informations sur les vols risquent de ne pas être prises en compte. Une grande fenêtre permettra de résoudre des problèmes plus importants mais, dans le même temps, certaines informations de vol risquent d'être prises en compte trop tôt. Dans les deux cas, l'efficacité de la solution est affectée. Un petit décalage entraînera la mise à jour de nombreuses variables de décision à chaque changement de fenêtre, un grand décalage entraînera la fixation de plus de variables de décision et la mise à jour de moins de variables de décision à chaque changement de fenêtre, ce qui affectera les performances de l'algorithme.

L'espace de solution de ce problème est considéré comme NP-Hard (Beasley, Krishnamoorthy, Sharaiha et Abramson 2000), ce qui justifie l'utilisation d'une méta-heuristique pour résoudre le problème et obtenir une solution (sous-)optimale. À cette fin, chaque sous-problème, défini par l'approche de la fenêtre glissante, a été résolu au moyen de la méta heuristique du recuit simulé (Kirkpatrick, Gelatt et Vecchi 1983). Cette méta heuristique s'est avérée très efficace pour résoudre des problèmes similaires (Man, Delahaye et Xiao-hao 2015, Ma, Delahaye, Sbihi et Mongeau 2016). Les définitions et les explications détaillées de l'approche par fenêtre glissante et de la méta heuristique sortent du cadre de cet article. Pour des informations plus détaillées et une meilleure compréhension de ce processus d'optimisation appliqué à ce type de problème spécifique, veuillez vous référer à Ma, Delahaye, et Sbihi (2016).
Environnement de simulation
La simulation d'événements discrets (DES) a été mise dans la boucle pour évaluer l'effet de l'incertitude dans les solutions proposées par l'algorithme d'optimisation, dans cette section, les avantages de l'utilisation de la simulation à cette fin sont décrits. L'utilisation de la DES permet d'inclure l'incertitude dans les scénarios, ce qui n'est pas possible ou très compliqué avec d'autres techniques. Dans ce contexte, l'introduction de l'incertitude par la simulation rend la situation plus proche de la réalité et, avec la définition de la robustesse, il est possible de parvenir à une solution qui n'est peut-être pas mathématiquement optimale mais qui résiste mieux aux perturbations du système réel. La DES a été largement utilisée dans de nombreux domaines, de la fabrication au transport, dès les dernières décennies, et elle s'est avérée utile pour l'analyse d'hypothèses, le test de scénarios et comme outil d'aide à la décision (Banks 1998, Brunner, Cross, McGhee, Levis et Whitney 1998, Negahban et Smith 2014). Dans le DES, le temps s'écoule en fonction de l'occurrence d'événements spécifiques et la séquence d'actions des entités est déjà connue à l'avance. L'utilisation de cette approche de modélisation est préférable à d'autres approches telles que la dynamique des agents ou des systèmes, car les processus modélisés suivent des processus séquentiels qui peuvent être correctement modélisés dans le cadre de ce paradigme. L'utilisation d'autres approches, comme celle basée sur les agents par exemple, est plus adaptée aux situations dans lesquelles les entités modélisées ont plus de degrés de liberté et où il est nécessaire d'implémenter la logique qui sous-tend le processus de prise de décision que les entités subissent. Dans le système modélisé dans ce travail, cela n'est pas nécessaire, ce qui nous donne un cadre plus flexible, plus facile à maintenir et plus rapide que celui qui peut être obtenu avec une technique différente.
Mise en œuvre
La méthodologie présentée au point 3.1 a été appliquée au problème de la détection et de la résolution des conflits dans les aéroports. Les sections suivantes présentent les principaux paramètres du modèle de simulation et d'optimisation ainsi que deux itérations de la méthodologie mise en œuvre et les résultats correspondants.
Paramètres de la méthodologie
Les paramètres impliqués dans cette méthodologie peuvent être classés en trois groupes : les paramètres contrôlables, les paramètres limites et les paramètres stochastiques. Les premiers font référence aux paramètres liés au problème étudié et sont donc spécifiques au problème. Les paramètres limites sont liés au processus d'optimisation lui-même et dépendent donc du type d'optimisation utilisé. Les paramètres contrôlables font partie du modèle d'optimisation, car ils représentent les variables de décision du problème. Les paramètres stochastiques représentent les sources de stochasticité du système et dépendent donc du système étudié. Dans les sections suivantes, ces paramètres sont présentés et discutés. Les paramètres contrôlables et les paramètres limites sont très importants car ils sont les moteurs de la mise en œuvre de la méthodologie. Chaque itération de la méthodologie est basée sur un réglage différent de ces paramètres. Les paramètres stochastiques sont mis en œuvre par le modèle de simulation, ce qui entraîne des facteurs clés pour la qualité de la méthodologie. Il est important de les choisir et de les calibrer correctement. Dans ce travail, une première estimation a été faite pour ces paramètres.
Paramètres contrôlables et paramètres limites
Les paramètres contrôlables du problème de détection et de résolution des conflits aéroportuaires pris en compte dans ce travail sont les suivants :
- Vitesse d'entrée dans l'espace aérien : augmentation ou diminution de la vitesse de l'avion entrant dans l'espace aérien pour l'approche finale.
- Temps d'entrée dans l'espace aérien : retarder ou avancer les aéronefs entrant dans l'espace aérien pour l'approche finale.
- Temps de refoulement : retarder les aéronefs à leur porte d'embarquement avant qu'ils ne partent au décollage.
Les paramètres limites font référence aux paramètres de la fenêtre coulissante :
- Taille de la fenêtre : définit la taille de chaque sous-problème résolu par l'algorithme.
- Taille du décalage : définit la taille du décalage pour la fenêtre et donc la quantité de variables de décision qui sont mises à jour pour chaque sous-problème.
Le tableau 2 récapitule les paramètres contrôlables et les paramètres limites avec leurs valeurs respectives utilisées pour la solution initiale optimisée. Notez que les valeurs des paramètres temps d'entrée dans l'espace aérien et temps de refoulement sont discrétisées selon un intervalle de 5 secondes, tandis que la vitesse d'entrée dans l'espace aérien est discrétisée selon un intervalle de 1 pour cent. Les paramètres d'optimisation sont continus.
Paramètres stochastiques
Les paramètres stochastiques du problème de détection et de résolution des conflits aéroportuaires considérés dans ce travail sont les suivants :
Tableau 2 : Paramètres contrôlables et paramètres limites.
| Vitesse d'entrée dans l'espace aérien | [-10% , 10%] |
| Temps d'entrée dans l'espace aérien | [-5 min. , 30 min.] |
| Temps de recul | [0 , 15 min] |
| Taille de la fenêtre | 3 heures |
| Taille de l'équipe | 30 min. |
- Déviation de l'heure d'entrée dans l'espace aérien
- Écart du temps de déplacement sur la voie de circulation
- Déviation du temps de repoussage
Le tableau 3 résume les paramètres stochastiques et leurs valeurs respectives utilisées dans le modèle de simulation. Il convient de noter que les paramètres stochastiques sont continus.
Tableau 3 : Paramètres stochastiques.
| Déviation de l'heure d'entrée dans l'espace aérien | [-30 sec. , +30 sec.] |
| Écart du temps de circulation sur la voie de circulation | [-10% , +10%] |
| Écart du temps de repoussage | [-60 sec. , +60 sec.] |
Expériences
La méthodologie proposée dans ce document a été appliquée au problème de la détection et de la résolution des conflits aéroportuaires. Au début, une solution représentant le programme original est donnée, puis une autre solution, mettant cette fois en œuvre le processus d'optimisation, est présentée et les deux solutions sont comparées l'une à l'autre. Après qu'une solution optimisée a été trouvée par l'algorithme d'optimisation, l'incertitude est introduite dans le modèle de simulation, où 50 répétitions ont été effectuées pour chaque exécution. Les résultats de la simulation sont ensuite analysés afin de tester la robustesse de la solution optimisée. De la même manière, une deuxième itération a été réalisée en exécutant le modèle d'optimisation en modifiant certains des paramètres méthodologiques présentés au point 4.1.1, puis en testant la nouvelle solution générée à l'aide du modèle de simulation. Le programme original est basé sur les données du trafic réel d'une journée (7 février 2016), à l'aéroport de Paris Charles de Gaulle, puisque le modèle d'optimisation et le modèle de simulation ont tous deux modélisé les opérations de cet aéroport spécifique. Dans les graphiques suivants, les résultats du programme initial sont illustrés, montrant de nombreux conflits pour l'espace aérien, les pistes et une grande surcharge de capacité pour le réseau de voies de circulation et les terminaux.
Les conflits liés à l'espace aérien et aux pistes ont été calculés sur une base horaire, ce qui permet de voir à quel moment de la journée ils sont concentrés. La Figure 4(a) montre que les heures de pointe des conflits dans l'espace aérien se situent aux alentours de 8, 9, 12, 13 et 20 heures, avec un nombre de conflits compris entre 80 et 90. En ce qui concerne les conflits sur les pistes (entrée et sortie), les figures 4(b) et 4(c) montrent qu'ils sont nombreux. Dans la tendance des conflits sur les pistes entrantes, il y a des pics entre 8 et 10 heures et aussi à 20 heures, dans la tendance des conflits sur les pistes sortantes, il y a des pics entre 11 et 12 heures et aussi à 14 heures.
En ce qui concerne les conflits de sortie de piste, la figure 5(a) montre qu'il y a une surcharge de la capacité, fixée à 18, de 9 à 14 heures et de 19 à 21 heures, avec un pic maximal de 25 vers 21 heures. La figure 5(b) montre le taux d'occupation pour les trois terminaux considérés, avec une surcharge constante de 6 à 21 heures, en particulier pour le terminal 1 (capacité de 11).
Premier tour
Selon la procédure méthodologique, dans la première étape de chaque itération, le modèle d'optimisation est exécuté et une solution optimisée est obtenue à partir de celui-ci. Dans le cas présent, l'exécution du modèle d'optimisation a permis de trouver un scénario sans conflit, tant pour l'espace aérien que pour les composantes terrestres. Les figures 6(a) et 6(b) montrent

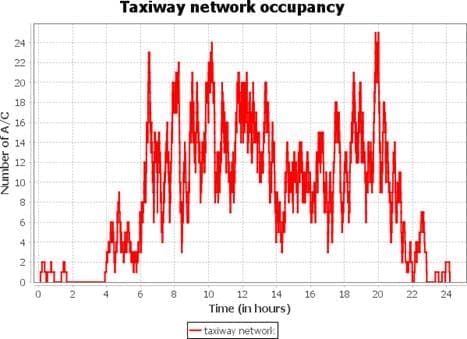

la tendance de l'occupation au cours de la journée pour le réseau de voies de circulation et les terminaux, où l'on peut remarquer qu'il n'y a pas de surcharge de capacité.
La première itération est terminée et la solution optimisée est exécutée dans le modèle de simulation. La figure 7 illustre les tendances des conflits horaires pour l'espace aérien et les pistes d'atterrissage.
Lorsque l'incertitude est incluse, on peut constater que, bien que la solution d'optimisation donne un scénario sans conflits, de nouveaux conflits apparaissent. Pour l'espace aérien en particulier, il y a un pic de 5 conflits horaires moyens à 9 heures, et d'autres conflits se répartissent au cours de la journée (voir figure 7(a)). En ce qui concerne la piste d'atterrissage, on constate qu'elle n'est pas très affectée par l'incertitude, puisque le pic de conflit horaire moyen est proche de 2 (voir figure 7(b)). La piste de sortie, en revanche, est plus affectée par l'incertitude ; dans ce cas, il y a de nombreux pics de conflit horaires moyens pendant la journée, 10 entre 11 et 12 heures, 12 entre 14 et 15 heures et 9 à 22 heures (voir figure 7(c)). En ce qui concerne la surcharge des composantes au sol, les terminaux n'ont pas été affectés par l'incertitude puisqu'il n'y avait pas de surcharge de capacité pour eux, la surcharge de capacité maximale moyenne des voies de circulation était de 2,05.
Deuxième itération
Une deuxième itération est effectuée car les résultats de la première itération ont montré la présence de conflits après l'inclusion de l'incertitude. Dans cette deuxième itération, le modèle d'optimisation a été exécuté en ajustant certains des paramètres contrôlables ou limites afin d'obtenir une nouvelle solution à tester avec le modèle de simulation. Dans ce cas, en exécutant le modèle d'optimisation, une nouvelle solution a été obtenue en changeant la taille de la fenêtre de l'approche d'optimisation par fenêtre glissante d'une fenêtre de 3 heures à une fenêtre de 2 heures. Ce choix a été justifié par le fait que souvent, lorsque la taille de la fenêtre est trop longue, l'algorithme considère trop tôt l'information de certains vols qui sont loin en avant dans le programme, ce qui peut conduire à une perte de la dynamique.
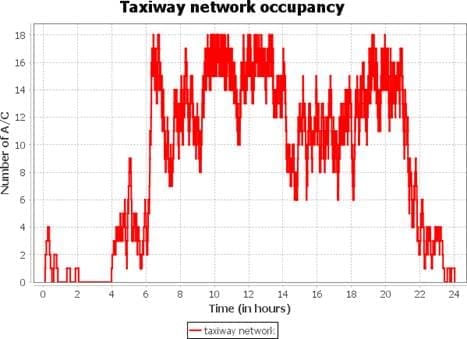

Figure 6 : Occupation du sol après optimisation, première itération.

L'avantage de l'approche est qu'elle affecte la qualité de la solution. Ainsi, tester une taille de fenêtre plus petite pourrait conduire à une solution plus robuste. Les résultats de la nouvelle solution sont présentés dans le tableau 4.
Tableau 4 : Résultats de l'optimisation, deuxième itération.
| Conflits dans l'espace aérien | 0 |
| Conflits de piste (entrée et sortie) | 1 |
| Réseau de voies de circulation (surcharge maximale + surcharge moyenne) | 0 |
| Terminal 1 (surcharge maximale + surcharge moyenne) | 1.04 |
| Terminal 2 (surcharge maximale + surcharge moyenne) | 0 |
| Borne 3 (surcharge maximale + surcharge moyenne) | 1.04 |
Comme on peut le constater, cette solution fournit un scénario presque sans conflit, puisque certains conflits apparaissent pour les pistes et pour les terminaux. Du point de vue de l'optimisation, cette solution n'est donc pas optimale, mais sous-optimale. Les figures 8(a), 8(b) et 8(c) illustrent les résultats obtenus après avoir testé cette solution au moyen du modèle de simulation. La figure 8(a) montre que trois pics de 4, 5 et 7 conflits horaires moyens sont observés à 6, 10 et 12 heures respectivement. En ce qui concerne les conflits horaires moyens sur la piste intérieure, la figure 8(b) indique deux pics de 1,6 et 2,1 à 8 et 12 heures respectivement. Les résultats pour la piste out n'enregistrent qu'un seul pic de 14 conflits horaires moyens à 14 heures.
Le tableau 5 résume les résultats des deux itérations. En examinant les deuxième et troisième colonnes, par rapport à la première et à la deuxième itération, on constate que la deuxième itération améliore la moyenne des conflits de sortie de piste de 89,9 à 85,32, mais n'améliore pas la moyenne des conflits dans l'espace aérien. Les valeurs des autres composantes, entrée de piste, voie de circulation et terminaux, sont stables entre la première et la deuxième itération.
Le résultat attendu de la méthodologie devrait être la diminution progressive du nombre de conflits après chaque itération et, en même temps, l'obtention d'une solution où les conflits sont équilibrés entre toutes les composantes de l'espace aérien.
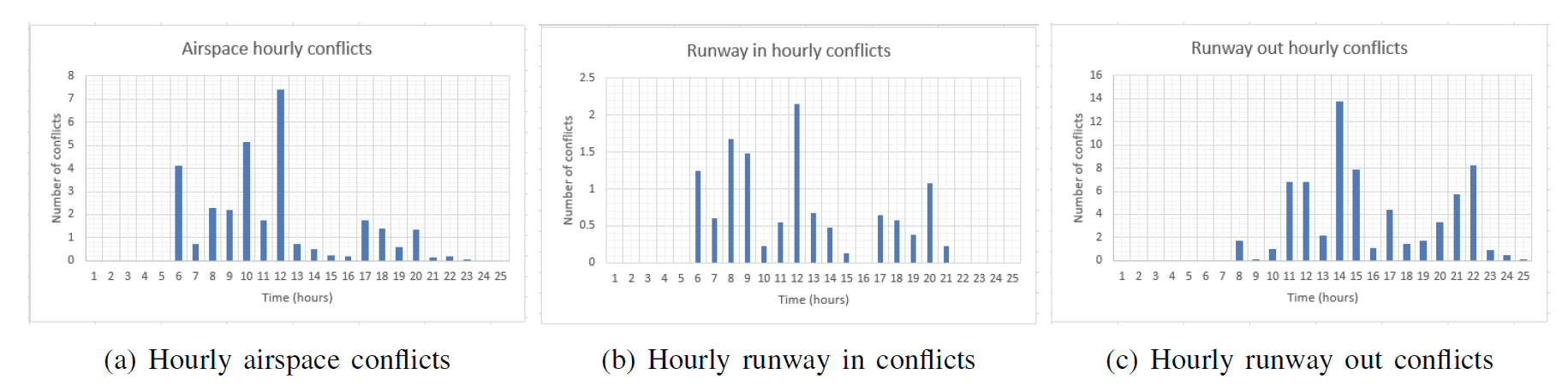
Tableau 5 : Comparaison entre les résultats des deux itérations.
| Première itération | Deuxième itération | |
|
Moyenne des conflits d'espace aérien |
19.60 | 26.77 |
|
Moyenne des conflits de piste |
9.30 | 9.50 |
|
Moyenne des conflits de sortie de piste |
89.90 | 85.32 |
|
Surcharge moyenne des voies de circulation |
2.05 | 2.06 |
|
Surcharge moyenne des terminaux |
0 | 0 |
les composants. Dans ce cas, après deux itérations, on peut constater que des améliorations ont été apportées pour certaines parties des systèmes, en particulier pour la sortie de piste, alors que pour l'espace aérien, la méthodologie n'a pas été en mesure d'apporter des améliorations. En ce qui concerne les composants au sol, les résultats ont confirmé qu'ils n'étaient pas très affectés par la variabilité, ce qui signifie qu'ils pouvaient être bien prédits. Cependant, l'interprétation des résultats après deux itérations, lorsque la performance globale du système aéroportuaire est considérée, souligne que la solution de la deuxième itération est plus équilibrée que la solution de la première itération, ce qui constitue une amélioration en termes de robustesse. La mise en œuvre d'autres itérations de cette méthodologie devrait permettre d'améliorer encore la robustesse des solutions.
L'impact sur les entreprises
Conclusion et étapes suivantes
Cet article présente un cadre pour l'amélioration de la robustesse des solutions optimisées appliquées au problème de la détection et de la résolution des conflits dans les aéroports. Les résultats démontrent la faisabilité du concept de combinaison des deux méthodologies pour fournir des solutions plus robustes. L'incertitude s'est avérée être une nuisance importante lorsqu'elle est appliquée à une solution optimisée. Les conflits liés à l'espace aérien et aux pistes d'atterrissage ont été les plus affectés par l'inclusion de la variabilité dans le système, tandis que les composantes terrestres y ont été moins sensibles. La méthodologie, mise en œuvre de manière itérative, a permis de réduire les conflits pour la sortie de piste, mais elle n'a pas été très efficace pour les conflits dans l'espace aérien. En général, après deux itérations, la méthodologie a permis d'obtenir une solution plus équilibrée. La discussion future porterait sur la manière de mettre en œuvre une approche cyclique afin de pouvoir affiner la robustesse de la solution obtenue par la combinaison des deux approches. D'autres études peuvent être menées sur le choix des paramètres à ajuster à chaque itération afin de la rendre plus efficace et efficiente. Un autre aspect qui peut être étudié dans le cadre d'un développement futur de la méthodologie est le choix des valeurs des paramètres stochastiques, qui peut être effectué, par exemple, en traitant des données historiques.
REMERCIEMENTS
Les auteurs tiennent à remercier l'Académie de l'aviation de l'Université des sciences appliquées d'Amsterdam, la Dutch Benelux Simulation Society et EUROSIM pour la diffusion des résultats de ce travail.