El desafío
de Paolo Scala y Miguel Mujica (Universidad de Ciencias Aplicadas de Ámsterdam) y Daniel Delahaye (Escuela Nacional de Aviación Civil).
Tal y como se presentó en la Winter Simulation Conference de 2017
Este trabajo aborda la mejora de la robustez de las soluciones heurísticas para sistemas de aviación afectados por la incertidumbre cuando se implementa la resolución de conflictos. Se describe un marco que incluye el uso de optimización y simulación que, a su vez, genera programaciones pseudoóptimas. La solución inicial se mejora progresivamente mediante la evaluación iterativa de la incertidumbre en las soluciones generadas y la calibración de acuerdo con la función objetivo. La simulación se utiliza para comprobar la viabilidad de una solución generada por un algoritmo de optimización en un entorno caracterizado por la incertidumbre. Los resultados muestran que la metodología es capaz de mejorar las soluciones para los escenarios con incertidumbre, lo que las convierte en excelentes candidatas para ser implementadas en entornos reales.
Introducción
Los Sistemas Aeroportuarios son considerados como infraestructuras críticas que promueven la conectividad, el valor de la región y claves para fomentar la interacción global de diferentes países, industrias y personas. Por ello, el crecimiento esperado es una amenaza para las instalaciones actuales y no debería ser deseable limitar el crecimiento por las limitaciones técnicas de las instalaciones. Además, el aeropuerto es una conexión de elementos y procesos que requieren herramientas adecuadas para gestionarlos eficientemente. Las operaciones aeroportuarias pueden distinguirse en operaciones del lado tierra y operaciones del lado aire, donde las operaciones del lado tierra son las que ocurren dentro de las terminales, y las operaciones del lado aire son las que ocurren fuera de la terminal. En cuanto a las operaciones en tierra, es posible identificar a los pasajeros como entidades y a los mostradores de facturación, las puertas de embarque o incluso los lugares de ocio, como tiendas y cafeterías, como recursos. En cuanto a las operaciones del lado aire, las aeronaves pueden identificarse como entidades, y la asistencia en tierra, las pistas, las calles de rodaje, los sectores del espacio aéreo, por citar sólo algunos de ellos, como recursos. Así pues, a partir de esta clasificación puede observarse que, en el sistema aeroportuario, se identifican dos subsistemas, muy diferentes entre sí y regidos por dinámicas y lógicas completamente distintas. Además, estos dos subsistemas diferentes interactúan entre sí y se influyen mutuamente en su rendimiento. Así pues, las características de un sistema aeroportuario, tal y como se han descrito anteriormente, se ajustan a la definición de sistemas complejos dada al principio de esta sección y, por lo tanto, los sistemas aeroportuarios deben considerarse sistemas complejos cuando se analizan. Otro elemento que caracteriza a los sistemas de aviación es la estocasticidad, los sistemas de aviación son por naturaleza estocásticos y por esa razón la simulación es una técnica clave para obtener la visión adecuada requerida con el fin de aumentar la previsibilidad. Además, la aviación depende en gran medida de los horarios, lo que también hace que sus problemas sean susceptibles de mejora mediante el uso de técnicas de optimización. Sin embargo, los profesionales han reconocido que las técnicas de optimización por sí solas se quedan cortas cuando se utilizan para resolver problemas de capacidad (Scala, Mujica y Delahaye 2016). En este contexto, un concepto fundamental que debe tenerse en cuenta es la robustez de la solución procedente de los modelos de optimización. Debido a la variabilidad del sistema, una solución proporcionada por un modelo de optimización puede cubrir varios escenarios con incertidumbre, por lo que una solución se define robusta si se puede aplicar a escenarios más inciertos sin cambios importantes en el rendimiento.
En la literatura hay muchos trabajos que están relacionados con la robustez de solución para problemas de aviación, el resultado de estos trabajos es el desarrollo de muchas herramientas y metodologías. Chandran y Balakrishnan (2007) propusieron un algoritmo de programación dinámica para la programación robusta de pistas. En su trabajo consideraron incertidumbres en los tiempos de llegada de las aeronaves, llegando a un compromiso entre el rendimiento de la pista y la probabilidad de violar la separación mínima en la pista como objetivo. Kim y Feron (2011) abordaron el problema de la asignación robusta de puertas de embarque cuando se introducen retrasos estocásticos. Definieron la robustez como el intervalo de tiempo entre dos aviones que aparcan en la misma puerta, de modo que cuanto mayor es el intervalo, más robusta es la solución. Calcularon el número y nivel de asignaciones perturbadas y resolvieron el problema utilizando un modelo de optimización lineal mixto 0-1 y la metaheurística de búsqueda tabú mostrando una mejora, en comparación con la programación original, en el número y nivel de asignaciones perturbadas del 92% y 95%, respectivamente. En el trabajo de Arias, Guimarans, Mujica, y Boosten (2013) se resuelve el problema estocástico de recuperación de aeronaves empleando el paradigma de programación con restricciones en combinación con técnicas de simulación, se evalúa la robustez de las soluciones comparando la desviación estándar obtenida de los resultados simulados con la variación de la distribución probabilística utilizada para generar los retrasos estocásticos, y su propagación esperada debido al tamaño del problema. En la tesis doctoral de Lee (2014) se abordó el problema de congestión de la superficie aeroportuaria, en su trabajo empleó la optimización para la programación de las operaciones de pistas y calles de rodaje y posteriormente la simulación estocástica para tratar las incertidumbres. Narciso y Piera (2015) consideraron el problema de asignación robusta de puertas de embarque proponiendo un modelo causal empleando el formalismo de redes de Petri coloreadas (CPN) obteniendo el número mínimo de puertas necesarias para absorber el tráfico.
El enfoque de este trabajo es la mejora de la robustez, tal y como se definió anteriormente, para soluciones procedentes de modelos de optimización resueltos mediante metaheurísticas. La metodología es iterativa, y tiene como objetivo encontrar las soluciones que mejor se ajustan a un sistema afectado por incertidumbres. En este trabajo se presenta una aplicación de esta metodología al problema de detección y resolución de conflictos aeroportuarios. Los resultados confirman que tras dos iteraciones, cambiando parámetros del algoritmo implementado para la resolución de este problema, es posible obtener una mejora en la solución inicial. El trabajo está organizado de la siguiente forma, en la sección 2 se describe el problema abordado en este trabajo, a continuación en la sección 3 se presenta la metodología junto con la descripción de la optimización y el modelo de simulación. En la sección 4 se muestra la implementación de la metodología aplicada al problema de detección y resolución de conflictos aeroportuarios y en la misma sección se muestran y discuten los resultados. En la sección final se presentan las conclusiones y el trabajo futuro.
Descripción del problema
En la actualidad, muchos aeropuertos europeos se encuentran al límite de su capacidad, lo que puede atribuirse al rápido crecimiento del tráfico aéreo en los últimos años. Además, se ha pronosticado un crecimiento en el tráfico aéreo (Airbus 2016) para los próximos años, por lo tanto, en un escenario futuro de congestión potencial, es necesario dar soluciones para superar este problema. La congestión aeroportuaria se identifica especialmente dentro del espacio aéreo del área terminal de maniobras (TMA) y en tierra en las proximidades de la entrada a pista. La TMA es una porción del espacio aéreo que rodea los aeropuertos, aquí convergen los flujos de aviones que aterrizan en la zona de operaciones del aeropuerto. Una buena gestión de la tasa de llegadas y salidas realizada por los controladores aéreos puede aliviar el aeropuerto, el espacio aéreo y el lado tierra, de posibles situaciones de congestión y, al mismo tiempo, aumentar el rendimiento de la pista (Frankovich 2012). El problema de detección y resolución de conflictos en aeropuertos, que se ha considerado en este documento, se refiere a la secuenciación del flujo de aterrizaje de aeronaves y la gestión de la capacidad en tierra. En este problema específico, los conflictos se detectan en el espacio aéreo debido a las restricciones de los mínimos de separación, y en tierra debido a las sobrecargas de capacidad. En las secciones siguientes se describen con más detalle los conflictos en el espacio aéreo, las pistas y los componentes de tierra. El objetivo de la resolución de este problema es garantizar la seguridad del flujo de aeronaves en el espacio aéreo reduciendo los conflictos en el espacio aéreo a cero y reducir las sobrecargas de capacidad en tierra. Para obtener información más detallada sobre este problema, consulte Ma, Delahaye y Sbihi (2016).
Conflictos en el espacio aéreo y en las pistas
En lo que respecta al espacio aéreo, dadas unas rutas de aterrizaje que se fusionan en un punto final (punto de aproximación inicial - IAF) (véase la Figura 1), y un conjunto de aeronaves que aterrizan, el objetivo principal es establecer la secuencia de las aeronaves para que se fusionen en el IAF sin incurrir en infracciones de los mínimos de separación. En cuanto a las pistas, los conflictos se detectan cuando la separación entre dos aeronaves consecutivas que cruzan la pista es inferior a los mínimos de separación exigidos. Los valores mínimos de separación se fijan en función de las diferentes operaciones en pista, que pueden ser llegadas (pista de entrada) o salidas (pista de salida), y se basan en la categoría de turbulencia de estela de la aeronave de cabeza y de la aeronave de cola. Los mínimos de separación para el espacio aéreo vienen dados por las normas de la OACI (OACI 2007) y los mínimos de separación para la pista se han tomado de Frankovich (2012).

Conflictos en tierra
En cuanto a las operaciones en tierra, el modelo desarrollado es de alto nivel, lo que significa que las operaciones en tierra no se modelan en detalle. Así pues, en primer lugar se identifican los principales componentes del suelo y, a continuación, se atribuye una capacidad a cada uno de ellos. Los principales componentes de tierra identificados son las calles de rodaje y las terminales. La capacidad se define como el número de aviones que utilizan simultáneamente uno de los componentes. Una vez que las aeronaves han aterrizado y salido de la pista, cruzan la calle de rodaje hasta estacionarse en la puerta de embarque. Como ya se ha mencionado, el modelo del suelo es de alto nivel, lo que significa que las rutas de las calles de rodaje no se han considerado en detalle, por lo que las operaciones en las calles de rodaje se han modelizado utilizando el tiempo medio de viaje. Los tiempos de vuelta se han basado en un horario real, y el tiempo de viaje en la calle de rodaje desde la puerta de embarque hasta la entrada en la pista de salida se ha considerado utilizando el tiempo medio de viaje. El objetivo es no superar la capacidad de estos componentes, conflictos que en este caso están representados por la suma de la sobrecarga de capacidad máxima y la sobrecarga de capacidad media. La tabla 1 muestra la capacidad de los principales componentes de tierra relacionados con el ejemplo considerado en este trabajo.
Tabla 1: Capacidad de los principales componentes de tierra.
| Componente de tierra | Capacidad |
| Red de calles de rodaje | 18 |
| Terminal 1 | 11 |
| Terminal 2 | 91 |
| Terminal 3 | 57 |
La solución
Marco de trabajo
El marco que se presentará en esta sección será la combinación de un modelo de optimización basado en ventanas deslizantes junto con un modelo basado en simulación de eventos discretos para lograr el alcance mencionado. En el resto de esta sección se presentará la estructura de la metodología y, a continuación, se describirán con más detalle tanto el proceso de optimización como el entorno de simulación.
Descripción de la metodología
La metodología propuesta en este trabajo puede representarse mediante dos pasos principales, tal y como se muestra en la Figura 2. En el primer paso, el sistema objeto de estudio se somete a un proceso de optimización con el fin de obtener soluciones óptimas o subóptimas en función de un objetivo concreto. En este trabajo, esta metodología se aplica al problema de detección y resolución de conflictos aeroportuarios, donde el objetivo del estudio es conseguir un escenario con cero conflictos. Teniendo en cuenta que el proceso de optimización conduce a una solución exacta, donde la mayoría de los parámetros operativos son deterministas, es probable que esta solución, cuando se pruebe en un entorno real, sea sensible a ligeros cambios debidos a la variabilidad del sistema. En el segundo paso de la metodología, se emplea la simulación para introducir la variabilidad del sistema y comprobar la solidez de la solución proporcionada por el proceso de optimización. En el entorno de simulación, se permite que algunos parámetros relevantes que afectan a la solución en la realidad tengan valores inciertos. Esta metodología es iterativa, lo que significa que estos dos pasos se aplicarán siempre y cuando se mejore la robustez de acuerdo con un cierto nivel de satisfacción, que representa la condición de parada del proceso iterativo. En este trabajo, la robustez se mide como la desviación en el rendimiento de la solución simulada respecto al escenario ideal, donde el rendimiento se evalúa como número de conflictos y el escenario ideal es una solución que da cero conflictos. En este contexto, la robustez mejora cuando se minimiza esta desviación.

Proceso de optimización
El proceso de optimización que se ha aplicado en esta metodología, y en concreto para el problema de detección y resolución de conflictos aeroportuarios, se basa en un enfoque de ventana deslizante. Las principales ventajas de este método son que los subproblemas son más fáciles de resolver y requieren menos tiempo computacional, además, aborda el problema de una manera dinámica mediante la actualización de las variables de decisión, mientras que la ventana se desliza a lo largo del horizonte temporal, lo que resulta en una mejora de la calidad de la solución. Este enfoque ya se ha empleado en problemas similares dando buenos resultados (Hu y Chen 2005, Zhan, Zhang, Li, Liu, Kwok, Ip, y Kaynak 2010, Furini, Kidd, Persiani, y Toth 2015, Toratani, Ueno, y Higuchi 2015, Man, Delahaye, y Xiao-hao 2015, Ma, Delahaye, Sbihi, y Mongeau 2016). En este enfoque, cada entidad (aeronave) se asocia a un determinado estado en función de su posición relativa respecto a la ventana actual. Como resultado, el estado de una entidad puede sercompletosi está fuera de la ventana actual;en cursosi la entidad está entre la ventana anterior y la actual;activosi la entidad está dentro de la ventana actual;planificadosi la entidad está en la ventana siguiente. En la ventana actual, las decisiones sólo se tomarán para las entidades en curso y activas, mientras que para las entidades completadas ya se han tomado. En cuanto a las entidades planificadas, las decisiones se tomarán en la ventana siguiente (véase la figura 3).
Los principales parámetros del enfoque de ventana deslizante son el tamaño de la ventana y el tamaño del desplazamiento, que afectan al rendimiento del proceso de optimización en términos de tiempo de cálculo y calidad de la solución, por lo que es crucial establecer estos dos parámetros con los valores adecuados para obtener buenas soluciones. Una ventana pequeña permitirá resolver subproblemas pequeños, pero es posible que no se tengan en cuenta algunos datos de vuelo. Una ventana grande llevará a resolver problemas más grandes pero al mismo tiempo alguna información de vuelo podría ser considerada demasiado pronto. En ambos casos, la eficacia de la solución se ve afectada. Un cambio pequeño llevará a actualizar muchas variables de decisión en cada cambio de ventana, un cambio grande llevará a fijar más variables de decisión y actualizar menos variables de decisión en cada cambio de ventana afectando al rendimiento del algoritmo.

El espacio de soluciones de este problema se considera NP-Hard (Beasley, Krishnamoorthy, Sharaiha y Abramson 2000), lo que justifica el uso de una metaheurística para resolver el problema y obtener una solución (sub)óptima. Para ello, cada subproblema, definido por el enfoque de ventana deslizante, se ha resuelto mediante la metaheurística de recocido simulado (Kirkpatrick, Gelatt y Vecchi 1983). Esta metaheurística ha demostrado ser muy eficiente cuando se trata de problemas similares (Man, Delahaye, y Xiao-hao 2015, Ma, Delahaye, Sbihi, y Mongeau 2016). Las definiciones y explicaciones detalladas del enfoque de ventana deslizante y de la metaheurística están fuera del alcance de este documento, para obtener información más detallada y una mejor comprensión de este proceso de optimización aplicado a este tipo específico de problema, consulte Ma, Delahaye, y Sbihi (2016).
Entorno de simulación
La simulación de eventos discretos (DES) se ha puesto en el bucle para evaluar el efecto de la incertidumbre en las soluciones propuestas por el algoritmo de optimización, en esta sección se describen las ventajas del uso de la simulación para este fin. El uso de DES permite incluir la incertidumbre en los escenarios, lo que no es posible o resulta muy complicado utilizando otras técnicas. En este contexto, la introducción de la incertidumbre con la simulación hace que la situación se acerque más a la realidad y con la definición de robustez es posible alcanzar una solución que puede no ser matemáticamente óptima pero sí más resistente a las perturbaciones del sistema real. El DES se ha utilizado ampliamente en muchos campos, desde la fabricación al transporte, ya desde las últimas décadas, y se ha demostrado su utilidad para el análisis hipotético, la comprobación de escenarios y como herramienta de apoyo a la toma de decisiones (Banks 1998, Brunner, Cross, McGhee, Levis y Whitney 1998, Negahban y Smith 2014). En el DES, el tiempo transcurre en función de la ocurrencia de eventos específicos y la secuencia de acciones que realizan las entidades ya se conoce de antemano. El uso de este enfoque de modelado es mejor que otros como el basado en agentes o la dinámica de sistemas debido a que los procesos modelados siguen procesos secuenciales que pueden modelarse adecuadamente bajo este paradigma. El uso de otros, como el basado en agentes, por ejemplo, es más adecuado para situaciones en las que las entidades modeladas tienen más grados de libertad y es necesario implementar la lógica que subyace al proceso de toma de decisiones que experimentan las entidades. En el sistema modelado en este trabajo, esto no es necesario, lo que nos proporciona un marco más flexible, fácil de mantener y más rápido que el que se puede conseguir con una técnica diferente.
Implementación
La metodología presentada en la sección 3.1 se ha aplicado al problema de detección y resolución de conflictos aeroportuarios. En las siguientes secciones se presentan los principales parámetros del modelo de simulación y optimización y dos iteraciones de la metodología implementada con los resultados relativos.
Parámetros de la metodología
Los parámetros que intervienen en esta metodología se pueden clasificar en tres grupos: parámetros controlables, parámetros de contorno y parámetros estocásticos. Los primeros se refieren a parámetros que están relacionados con el problema bajo estudio y por lo tanto son específicos del problema. Los parámetros de contorno están relacionados con el propio proceso de optimización, por lo que dependen del tipo de optimización que se haya utilizado. Los parámetros controlables forman parte del modelo de optimización, ya que representan las variables de decisión del problema. Los parámetros estocásticos representan las fuentes de estocasticidad del sistema, por lo que dependen del sistema estudiado. En las siguientes secciones se presentan y discuten estos parámetros. Los parámetros controlables y los parámetros de contorno son muy importantes porque son los impulsores de la aplicación de la metodología. Cada iteración de la metodología se basa en un ajuste diferente de estos parámetros. Los parámetros estocásticos son implementados por el modelo de simulación resultando factores clave para la bondad de la metodología. Es importante elegirlos y calibrarlos adecuadamente, en este trabajo se ha realizado una estimación inicial de los mismos.
Parámetros controlables y de frontera
Los parámetros controlables del problema de detección y resolución de conflictos aeroportuarios considerados en este trabajo son:
- Velocidad de entrada en el espacio aéreo: aumento o disminución de la velocidad de la aeronave que entra en el espacio aéreo para la aproximación final.
- Tiempo de entrada en el espacio aéreo: retrasa o adelanta la entrada de las aeronaves en el espacio aéreo para la aproximación final.
- Tiempo de retroceso: retrasar las aeronaves en sus puertas de embarque antes de que salgan.
Los parámetros límite se refieren a los parámetros de la ventana deslizante:
- Tamaño de la ventana: define el tamaño para cada subproblema resuelto por el algoritmo.
- Tamaño del desplazamiento: define el tamaño del desplazamiento para la ventana y, por tanto, la cantidad de variables de decisión que se actualizan para cada subproblema.
En la Tabla 2 se resumen los parámetros controlables y de contorno con sus respectivos valores utilizados para la solución inicial optimizada. Obsérvese que los valores de los parámetros tiempo de entrada en el espacio aéreo y tiempo de retroceso se discretizan según un intervalo de 5 segundos, mientras que la velocidad de entrada en el espacio aéreo se discretiza según un intervalo de 1 por ciento. Los parámetros de optimización son continuos.
Parámetros estocásticos
Los parámetros estocásticos del problema de detección y resolución de conflictos aeroportuarios considerados en este trabajo son:
Tabla 2: Parámetros controlables y de frontera.
| Velocidad de entrada en el espacio aéreo | [-10% , 10%] |
| Tiempo de entrada en el espacio aéreo | [-5 min. , 30 min.] |
| Tiempo de retroceso | [0 , 15 min.] |
| Tamaño de la ventana | 3 horas |
| Tamaño del turno | 30 min. |
- Desviación del tiempo de entrada en el espacio aéreo
- Desviación del tiempo de recorrido en pista
- Desviación del tiempo de retroceso
En la Tabla 3 se resumen los parámetros estocásticos con sus respectivos valores utilizados en el modelo de simulación. Obsérvese que los parámetros estocásticos son continuos.
Tabla 3: Parámetros estocásticos.
| Desviación del tiempo de entrada en el espacio aéreo | [-30 seg. , +30 seg.] |
| Desviación del tiempo en pista | [-10% , +10%] |
| Desviación del tiempo de retroceso | [-60 seg. , +60 seg.] |
Experimentos
La metodología propuesta en este trabajo se ha aplicado al problema de detección y resolución de conflictos aeroportuarios, en este trabajo se presentan dos iteraciones de la metodología. Al principio se da una solución que representa el horario original, después se presenta otra solución, esta vez implementando el proceso de optimización, y las dos soluciones se comparan entre sí. Después de encontrar una solución optimizada mediante el algoritmo de optimización, se introduce la incertidumbre con el modelo de simulación, en el que se completaron 50 réplicas para cada ejecución. A continuación, se analiza el resultado de la simulación para comprobar la solidez de la solución optimizada. Del mismo modo, se realizó una segunda iteración ejecutando el modelo de optimización cambiando algunos de los parámetros de la metodología presentados en 4.1.1 y, a continuación, probando la nueva solución generada con el modelo de simulación. La programación original se basa en los datos de tráfico reales de un día (7 de febrero de 2016), en el aeropuerto de París Charles de Gaulle, ya que tanto el modelo de optimización como el de simulación han modelizado las operaciones de este aeropuerto en concreto. En los gráficos siguientes se ilustran los resultados de la programación inicial, que muestran numerosos conflictos en el espacio aéreo y las pistas, así como una gran sobrecarga de capacidad en la red de calles de rodaje y las terminales.
En cuanto a los conflictos en el espacio aéreo y las pistas, se han calculado por horas, lo que permite ver en qué momento del día se concentran. La figura 4(a) muestra que las horas punta de conflictos en el espacio aéreo se producen en torno a las 8, 9, 12, 13 y 20 horas, oscilando entre 80 y 90 conflictos. En cuanto a los conflictos en las pistas (entrada y salida), las figuras 4(b) y 4(c) muestran que hay muchos conflictos en ellas. En la tendencia de conflictos en la pista de entrada hay picos entre las 8 y las 10 horas y también a las 20 horas, en la tendencia de conflictos en la pista de salida hay picos entre las 11 y las 12 horas y también a las 14 horas.
En cuanto a los conflictos de taxi out, en la Figura 5(a) se observa que hay una sobrecarga en la capacidad, que se fija en 18, de las 9 a las 14 horas y de las 19 a las 21 horas, con un pico máximo de 25 alrededor de las 21 horas. La figura 5(b) muestra la ocupación para las tres terminales consideradas, donde especialmente para la terminal 1 (capacidad 11) hay una sobrecarga constante de las 6 a las 21 horas.
Primera iteración
De acuerdo con el procedimiento metodológico, en el primer paso de cada iteración se ejecuta el modelo de optimización y a partir de él se obtiene una solución optimizada. En este caso, después de ejecutar el modelo de optimización se ha encontrado un escenario con cero conflictos tanto para el espacio aéreo como para los componentes terrestres. Las figuras 6(a) y 6(b) muestran

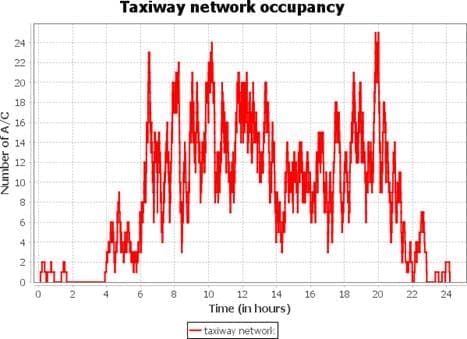

la tendencia de ocupación durante el día para la red de calles de rodaje y terminales, donde se observa que no hay sobrecarga de capacidad.
La primera iteración se completa ejecutando la solución optimizada en el modelo de simulación, en la figura 7 se ilustran las tendencias de los conflictos horarios para el espacio aéreo y las pistas.
Cuando se incluye la incertidumbre se observa que, a pesar de que la solución de optimización da un escenario sin conflictos, aparecen nuevos conflictos. Concretamente para el espacio aéreo, hay un pico de 5 conflictos horarios medios a las 9 horas, y algunos otros conflictos repartidos a lo largo del día (véase la figura 7(a)). En cuanto a la pista de entrada, se observa que no se ve muy afectada por la incertidumbre, ya que el pico medio horario de conflictos es de casi 2 (véase la figura 7(b)). La pista de salida, en cambio, se ve más afectada por la incertidumbre, en este caso hay muchos picos medios horarios de conflicto durante el día, 10 entre las 11 y las 12 horas, 12 entre las 14 y las 15 horas y 9 a las 22 horas (ver figura 7(c)). En cuanto a la sobrecarga de los componentes de tierra, las terminales no se vieron afectadas por la incertidumbre, ya que no hubo sobrecarga de capacidad para ellas, la sobrecarga de capacidad máxima media de las calles de rodaje fue de 2,05.
Segunda iteración
Se realiza una segunda iteración ya que los resultados de la primera iteración mostraron la presencia de conflictos tras la inclusión de la incertidumbre. En esta segunda iteración se ha ejecutado el modelo de optimización ajustando algunos de los parámetros controlables o de contorno para disponer de una nueva solución a probar con el modelo de simulación. En este caso, al ejecutar el modelo de optimización, se ha obtenido una nueva solución cambiando el tamaño de la ventana del enfoque de optimización de ventana deslizante de una ventana de 3 horas a una ventana de 2 horas. Esta elección se justifica por el hecho de que, a menudo, cuando el tamaño de la ventana es demasiado largo, el algoritmo considera demasiado pronto la información de algunos vuelos que están muy adelantados en la programación, y esto puede llevar a una pérdida de la dinámica.
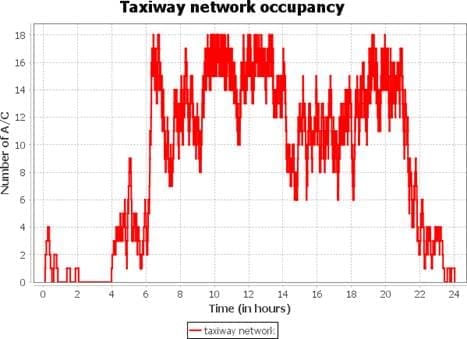

Figura 6: Ocupación del suelo tras la optimización

ventaja del enfoque que afecta a la calidad de la solución. Por tanto, probar un tamaño de ventana menor podría conducir a una solución más robusta. Los resultados de la nueva solución se muestran en la Tabla 4.
Tabla 4: Resultados de la optimización, segunda iteración.
| Conflictos en el espacio aéreo | 0 |
| Conflictos en pista (entrada y salida) | 1 |
| Red de pistas de rodaje (sobrecarga máxima + sobrecarga media) | 0 |
| Terminal 1 (sobrecarga máxima + sobrecarga media) | 1.04 |
| Terminal 2 (sobrecarga máxima + sobrecarga media) | 0 |
| Borne 3 (sobrecarga máxima + sobrecarga media) | 1.04 |
Como puede observarse, esta solución proporciona un escenario casi libre de conflictos, ya que aparecen algunos conflictos para las pistas, y para las terminales. Así pues, desde el punto de vista de la optimización, esta solución no es óptima, sino subóptima. En las figuras 8(a), 8(b) y 8(c) se ilustran los resultados obtenidos tras probar esta solución mediante el modelo de simulación. En la figura 8(a) se puede observar que se encuentran tres picos de 4, 5 y 7 conflictos horarios medios en el espacio aéreo a las 6, 10 y 12 horas respectivamente. En cuanto a los conflictos horarios medios de la pista de entrada, como puede verse en la figura 8(b), hay dos picos de 1,6 y 2,1 a las 8 y 12 horas respectivamente. Los resultados de la pista de salida sólo registran un pico de 14 conflictos horarios medios a las 14 horas.
En la tabla 5 se resumen los resultados de las dos iteraciones. Observando la segunda y la tercera columna, en relación con la primera y la segunda iteración, se puede notar que la segunda iteración mejora el promedio de conflictos de salida de pista de 89,9 a 85,32, mientras que no mejora el promedio de conflictos de espacio aéreo. Los valores de los demás componentes, pista de entrada, pista de rodaje y terminales se mantienen estables entre la primera y la segunda iteración.
El resultado esperado de la metodología debería ser la disminución progresiva del número de conflictos después de cada iteración y, al mismo tiempo, la obtención de una solución en la que los conflictos estén equilibrados entre todos los componentes.
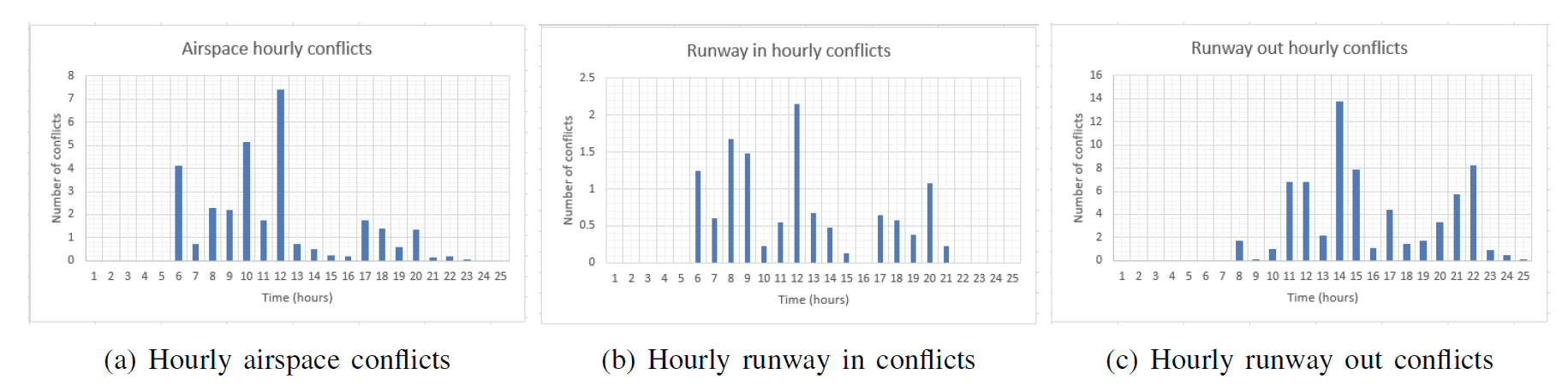
Tabla 5: Comparación entre los resultados de las dos iteraciones.
| Primera iteración | Segunda iteración | |
|
Media de conflictos en el espacio aéreo |
19.60 | 26.77 |
|
Pista media en conflictos |
9.30 | 9.50 |
|
Media de conflictos fuera de pista |
89.90 | 85.32 |
|
Sobrecarga media de la pista de rodaje |
2.05 | 2.06 |
|
Sobrecarga media en terminales |
0 | 0 |
los componentes. En este caso, tras dos iteraciones, puede observarse que se han alcanzado algunas mejoras para algunas partes de los sistemas, especialmente para la salida de pista, mientras que para el espacio aéreo, la metodología no fue capaz de introducir mejoras. En cuanto a los componentes de tierra, los resultados confirmaron que no se veían muy afectados por la variabilidad, lo que significa que podían predecirse bien. Sin embargo, la interpretación del resultado tras dos iteraciones, cuando se considera el rendimiento global del sistema aeroportuario, señala que la solución de la segunda iteración es más equilibrada que la solución de la primera iteración, lo que supone una mejora en términos de robustez. Aplicando nuevas iteraciones de esta metodología, se espera obtener aún más mejoras en la robustez de las soluciones.
El impacto empresarial
Conculcación y pasos ulteriores
En este artículo se presenta un marco para la mejora de la robustez de las soluciones optimizadas aplicadas al problema de detección y resolución de conflictos en aeropuertos. Los resultados demuestran la viabilidad del concepto de combinar las dos metodologías para proporcionar soluciones más robustas. Se confirmó que la incertidumbre es muy molesta cuando se aplica a una solución optimizada. Los conflictos en el espacio aéreo y en las pistas fueron los más afectados tras incluir la variabilidad en el sistema, mientras que los componentes terrestres fueron menos sensibles a ella. La metodología, aplicada de forma iterativa, fue capaz de reducir los conflictos para la salida de pista, sin embargo, no fue muy eficaz para los conflictos en el espacio aéreo. En general, tras dos iteraciones, la metodología logró una solución más equilibrada. El debate posterior se centraría en cómo aplicar un enfoque cíclico para poder afinar la solidez de la solución obtenida mediante la combinación de los dos enfoques. Se pueden realizar más estudios sobre la elección de los parámetros que se deben ajustar en cada iteración para que sea más eficaz y eficiente. Otro aspecto que puede estudiarse como desarrollo futuro de la metodología es la elección de los valores de los parámetros estocásticos que puede hacerse, por ejemplo, procesando datos históricos.
AGRADECIMIENTOS
Los autores agradecen a la Academia de Aviación de la Universidad de Ciencias Aplicadas de Amsterdam y a la Sociedad de Simulación del Benelux Holandés y EUROSIM la difusión de los resultados de este trabajo.