O desafio
por Paolo Scala e Miguel Mujica (Universidade de Ciências Aplicadas de Amsterdã) e Daniel Delahaye (Escola Nacional de Aviação Civil)
Conforme apresentado na Conferência de Simulação de Inverno de 2017
Este artigo trata do aprimoramento da robustez das soluções heurísticas para sistemas de aviação afetados pela incerteza quando a resolução de conflitos é implementada. É descrita uma estrutura que inclui o uso de otimização e simulação que, por sua vez, gera programações pseudo-ótimas. A solução inicial é aprimorada progressivamente por meio da avaliação iterativa da incerteza nas soluções geradas e da calibração de acordo com a função objetiva. A simulação é usada para testar a viabilidade de uma solução gerada por um algoritmo de otimização em um ambiente caracterizado pela incerteza. Os resultados mostram que a metodologia é capaz de melhorar as soluções para os cenários com incerteza, tornando-as excelentes candidatas a serem implementadas em ambientes reais.
Introdução
Os sistemas aeroportuários são considerados infraestruturas críticas que promovem a conectividade, o valor para a região e a chave para fomentar a interação global de diferentes países, setores e pessoas. Por esse motivo, o crescimento esperado é uma ameaça para as instalações atuais e não é desejável limitar o crescimento pelas limitações técnicas das instalações. Além disso, o aeroporto é uma conexão de elementos e processos que exigem ferramentas adequadas para gerenciá-los com eficiência. As operações aeroportuárias podem ser diferenciadas em operações no lado terra e operações no lado ar, sendo que as operações no lado terra são as que ocorrem dentro dos terminais e as operações no lado ar são as que ocorrem fora do terminal. Em relação às operações em terra, é possível identificar os passageiros como entidades e os balcões de check-in, portões de embarque ou até mesmo locais de recreação, como lojas e cafeterias, como recursos. Em relação às operações no lado ar, as aeronaves podem ser identificadas como entidades, e o manuseio em solo, pistas de pouso e decolagem, setores do espaço aéreo, para citar apenas alguns deles, como recursos. Portanto, a partir dessa classificação, pode-se notar que, no sistema aeroportuário, são identificados dois subsistemas, muito diferentes entre si e regidos por dinâmicas e lógicas completamente diferentes. Além disso, esses dois subsistemas diferentes interagem entre si e afetam o desempenho um do outro. Assim, as características de um sistema aeroportuário, conforme descrito anteriormente, estão de acordo com a definição de sistemas complexos dada no início desta seção e, portanto, os sistemas aeroportuários devem ser considerados sistemas complexos quando são analisados. Outro elemento que caracteriza os sistemas de aviação é a estocasticidade. Os sistemas de aviação são, por natureza, estocásticos e, por esse motivo, a simulação é uma técnica fundamental para obter a percepção adequada necessária para aumentar a previsibilidade. Além disso, a aviação é altamente dependente de cronogramas, o que também torna seus problemas propensos a serem aprimorados pelo uso de técnicas de otimização. No entanto, os profissionais reconheceram que as técnicas de otimização, por si só, não são suficientes quando usadas para resolver problemas de capacidade (Scala, Mujica e Delahaye, 2016). Nesse contexto, um conceito fundamental que precisa ser considerado é a robustez da solução proveniente dos modelos de otimização. Devido à variabilidade do sistema, uma solução fornecida por um modelo de otimização pode abranger vários cenários com incerteza, portanto, uma solução é definida como robusta se puder ser aplicada a cenários mais incertos sem grandes alterações no desempenho.
Na literatura, há muitos trabalhos relacionados à robustez da solução para problemas de aviação, e o resultado desses trabalhos é o desenvolvimento de muitas ferramentas e metodologias. Chandran e Balakrishnan (2007) propuseram um algoritmo de programação dinâmica para programação robusta de pistas de pouso. Em seu trabalho, eles consideraram incertezas nos horários de chegada das aeronaves, chegando a um equilíbrio entre o rendimento da pista e a probabilidade de violação do mínimo de separação na pista como objetivo. Kim e Feron (2011) abordaram o problema de atribuição robusta de portões quando são introduzidos atrasos estocásticos. Eles definiram a robustez como o intervalo de tempo entre duas aeronaves que estacionam no mesmo portão, de modo que quanto maior for o intervalo, mais robusta será a solução. Eles calcularam o número e o nível de atribuições perturbadas e resolveram o problema usando um modelo de otimização linear misto 0-1 e a meta heurística de busca tabu, mostrando melhorias, em comparação com o cronograma original, no número e no nível de atribuições perturbadas de 92% e 95%, respectivamente. No trabalho de Arias, Guimarans, Mujica e Boosten (2013), o problema estocástico de recuperação de aeronaves é resolvido empregando o paradigma de programação com restrições em combinação com técnicas de simulação. A robustez das soluções é avaliada comparando o desvio padrão obtido dos resultados simulados com a variação da distribuição probabilística usada para gerar atrasos estocásticos e sua propagação esperada devido ao tamanho do problema. Na tese de doutorado de Lee (2014), o problema de congestionamento da superfície do aeroporto foi abordado. Em seu trabalho, ele empregou a otimização para programar as operações das pistas de pouso e decolagem e, em seguida, a simulação estocástica para lidar com as incertezas. Narciso e Piera (2015) consideraram o problema de atribuição robusta de portões propondo um modelo causal empregando o formalismo de redes de Petri coloridas (CPN) para obter o número mínimo de portões necessários para absorver o tráfego.
O foco deste trabalho é o aprimoramento da robustez, conforme definido anteriormente, para soluções provenientes de modelos de otimização resolvidos por meta-heurísticas. A metodologia é iterativa e visa encontrar soluções que melhor se ajustem a um sistema afetado por incertezas. Neste artigo, é apresentada uma aplicação dessa metodologia ao problema de detecção e resolução de conflitos em aeroportos. Os resultados confirmam que, após duas iterações, alterando os parâmetros do algoritmo implementado para resolver esse problema, é possível obter uma melhoria na solução inicial. O artigo está organizado da seguinte forma: na seção 2, o problema abordado neste artigo é descrito; em seguida, na seção 3, a metodologia é apresentada juntamente com a descrição da otimização e do modelo de simulação. A seção 4 mostra a implementação da metodologia aplicada ao problema de detecção e resolução de conflitos em aeroportos e, na mesma seção, os resultados são mostrados e discutidos. Na última seção, são apresentadas as conclusões e os trabalhos futuros.
Descrição do problema
Atualmente, muitos aeroportos europeus estão no limite de sua capacidade, o que pode ser atribuído ao rápido crescimento do tráfego aéreo nos últimos anos. Além disso, foi previsto um crescimento no tráfego aéreo (Airbus 2016) para os próximos anos, portanto, em um cenário futuro de congestionamento em potencial, é necessário oferecer soluções para superar esse problema. O congestionamento do aeroporto é identificado especialmente dentro da área de manobra do terminal do espaço aéreo (TMA) e no solo, nas proximidades da entrada da pista. A TMA é uma parte do espaço aéreo que circunda os aeroportos, onde o fluxo de aeronaves que pousam converge para o lado aéreo do aeroporto. Um bom gerenciamento da taxa de chegadas e partidas feito pelos controladores de tráfego aéreo pode aliviar o aeroporto, o espaço aéreo e o lado do solo de possíveis situações de congestionamento e, ao mesmo tempo, aumentar o rendimento da pista (Frankovich 2012). O problema de detecção e resolução de conflitos no aeroporto, considerado neste artigo, refere-se ao sequenciamento do fluxo de pouso de aeronaves e ao gerenciamento da capacidade do solo. Nesse problema específico, os conflitos são detectados no espaço aéreo devido a restrições de mínimos de separação e no solo devido a sobrecargas de capacidade. Nas próximas seções, os conflitos no espaço aéreo, nas pistas e nos componentes do solo são descritos com mais detalhes. O objetivo de solucionar esse problema é garantir a segurança do fluxo de aeronaves no espaço aéreo, reduzindo os conflitos no espaço aéreo a zero e reduzindo as sobrecargas de capacidade no solo. Para obter informações mais detalhadas sobre esse problema, consulte Ma, Delahaye e Sbihi (2016).
Conflitos no espaço aéreo e na pista
No que diz respeito ao espaço aéreo, considerando algumas rotas de pouso que se fundem em um ponto final (ponto de aproximação inicial - IAF) (veja a Figura 1) e um conjunto de aeronaves de pouso, o objetivo principal é fazer a sequência das aeronaves de modo que elas se fundam no IAF sem incorrer em violações dos mínimos de separação. Em relação às pistas, os conflitos são detectados quando a separação entre duas aeronaves consecutivas que estão cruzando a pista é menor do que os mínimos de separação exigidos. Os valores mínimos de separação são definidos de acordo com as diferentes operações da pista, que podem ser chegadas (entrada na pista) ou partidas (saída da pista), e baseiam-se na categoria de turbulência da esteira da aeronave que lidera e da que segue. Os mínimos de separação para o espaço aéreo são fornecidos pelas normas da ICAO (ICAO 2007) e os mínimos de separação para a pista de pouso e decolagem foram extraídos de Frankovich (2012).

Conflitos no solo
Com relação às operações em solo, o modelo desenvolvido é de alto nível, o que significa que as operações em solo não são modeladas em detalhes. Portanto, primeiro os principais componentes do solo são identificados e, em seguida, uma capacidade é atribuída a cada um deles. Os principais componentes de solo identificados são as pistas de taxiamento e os terminais. A capacidade é definida como o número de aeronaves que estão usando simultaneamente um dos componentes. Depois que a aeronave aterrissa e sai da pista, ela atravessa a pista de taxiamento até estacionar no portão. Como mencionado anteriormente, o modelo do solo é de alto nível, o que significa que as rotas das pistas de taxiamento não foram consideradas em detalhes; portanto, as operações das pistas de taxiamento foram modeladas usando o tempo médio de viagem. Os tempos de retorno foram baseados em um cronograma real, e o tempo de viagem na pista de taxiamento desde o portão até a entrada na pista de decolagem foi considerado usando o tempo médio de viagem. O objetivo é não exceder a capacidade desses componentes, os conflitos, nesse caso, são representados pela soma da sobrecarga da capacidade máxima e da sobrecarga da capacidade média. A Tabela 1 mostra a capacidade dos principais componentes do solo relacionados ao exemplo considerado neste trabalho.
Tabela 1: Capacidade do componente principal de aterramento.
| Componente de aterramento | Capacidade |
| Rede de pistas de táxi | 18 |
| Terminal 1 | 11 |
| Terminal 2 | 91 |
| Terminal 3 | 57 |
A solução
Estrutura
A estrutura que será apresentada nesta seção será a combinação de um modelo de otimização baseado em janela deslizante com um modelo baseado em simulação de eventos discretos para atingir o escopo mencionado acima. No restante desta seção, a estrutura da metodologia será apresentada e, em seguida, o processo de otimização e o ambiente de simulação serão descritos em mais detalhes.
Descrição da metodologia
A metodologia proposta neste documento pode ser representada por duas etapas principais, conforme ilustrado na Figura 2. Na primeira etapa, o sistema em estudo é submetido a um processo de otimização com o objetivo de obter soluções ótimas ou subótimas de acordo com um objetivo específico. Neste trabalho, essa metodologia é aplicada ao problema de detecção e resolução de conflitos em aeroportos, em que o objetivo do estudo é obter um cenário com zero conflitos. Levando em conta que o processo de otimização leva a uma solução exata, em que a maioria dos parâmetros operacionais é determinística, é provável que essa solução, quando testada em um ambiente real, seja sensível a pequenas alterações devido à variabilidade do sistema. Na segunda etapa da metodologia, a simulação é empregada para introduzir a variabilidade do sistema e testar a robustez da solução fornecida pelo processo de otimização. No ambiente de simulação, alguns parâmetros relevantes que afetam a solução na realidade podem ter valores incertos. Essa metodologia é iterativa, o que significa que essas duas etapas serão aplicadas enquanto a robustez for aprimorada de acordo com um determinado nível de satisfação, que representa a condição de parada do processo iterativo. Neste trabalho, a robustez é medida como o desvio no desempenho da solução simulada em relação ao cenário ideal, em que o desempenho é avaliado como o número de conflitos e o cenário ideal é uma solução que gera zero conflitos. Nesse contexto, a robustez é aprimorada quando esse desvio é minimizado.

Processo de otimização
O processo de otimização que foi aplicado nessa metodologia, e especificamente para o problema de detecção e resolução de conflitos em aeroportos, baseia-se em uma abordagem de janela deslizante. As principais vantagens desse método são que os subproblemas são mais fáceis de resolver e exigem menos tempo de computação; além disso, ele aborda o problema de forma dinâmica, atualizando as variáveis de decisão enquanto a janela desliza ao longo do horizonte de tempo, o que resulta em uma melhoria da qualidade da solução. Essa abordagem já foi empregada em problemas semelhantes com bons resultados (Hu e Chen 2005, Zhan, Zhang, Li, Liu, Kwok, Ip e Kaynak 2010, Furini, Kidd, Persiani e Toth 2015, Toratani, Ueno e Higuchi 2015, Man, Delahaye e Xiao-hao 2015, Ma, Delahaye, Sbihi e Mongeau 2016). Nessa abordagem, cada entidade (aeronave) é associada a um determinado status de acordo com sua posição em relação à janela atual. Como resultado, o status de uma entidade pode serconcluídose ela estiver fora da janela atual;em andamentose a entidade estiver entre a janela anterior e a atual;ativase a entidade estiver dentro da janela atual;planejadase a entidade estiver na próxima janela. Na janela atual, as decisões serão tomadas somente para as entidades com status em andamento e ativo, enquanto que para as entidades concluídas elas já foram tomadas. Com relação às entidades planejadas, as decisões serão tomadas na próxima janela (veja a Figura 3).
Os principais parâmetros da abordagem de janela deslizante são o tamanho da janela e o tamanho do deslocamento, que afetam o desempenho do processo de otimização em termos de tempo de computação e qualidade da solução, portanto, é fundamental definir esses dois parâmetros com valores adequados para obter boas soluções. Uma janela pequena levará à solução de subproblemas pequenos, mas algumas informações de voo podem não ser consideradas. Uma janela grande levará à solução de problemas maiores, mas, ao mesmo tempo, algumas informações de voo poderão ser consideradas muito cedo. Em ambos os casos, a eficácia da solução é afetada. Uma mudança pequena levará à atualização de muitas variáveis de decisão a cada mudança de janela, enquanto uma mudança grande levará à fixação de mais variáveis de decisão e à atualização de menos variáveis de decisão a cada mudança de janela, afetando o desempenho do algoritmo.

O espaço de solução desse problema é considerado NP-Hard (Beasley, Krishnamoorthy, Sharaiha e Abramson 2000), o que justifica o uso de uma meta heurística para resolver o problema e obter uma solução (sub)ótima. Para esse fim, cada subproblema, definido pela abordagem de janela deslizante, foi resolvido por meio da meta heurística de recozimento simulado (Kirkpatrick, Gelatt e Vecchi 1983). Essa meta heurística provou ser muito eficiente ao lidar com problemas semelhantes (Man, Delahaye e Xiao-hao 2015, Ma, Delahaye, Sbihi e Mongeau 2016). As definições e explicações detalhadas da abordagem de janela deslizante e da meta heurística estão fora do escopo deste documento. Para obter informações mais detalhadas e uma melhor compreensão desse processo de otimização aplicado a esse tipo específico de problema, consulte Ma, Delahaye e Sbihi (2016).
Ambiente de simulação
A simulação de eventos discretos (DES) foi colocada no circuito para avaliar o efeito da incerteza nas soluções propostas pelo algoritmo de otimização. Nesta seção, são descritas as vantagens do uso da simulação para essa finalidade. O uso do DES permite incluir a incerteza nos cenários, o que não é possível ou é altamente complicado usando outras técnicas. Nesse contexto, a introdução da incerteza com a simulação torna a situação mais próxima da realidade e, com a definição de robustez, é possível obter uma solução que pode não ser matematicamente ideal, mas mais resistente a interrupções no sistema real. O DES tem sido amplamente utilizado em muitos campos, desde a manufatura até o transporte, desde as últimas décadas, e tem se mostrado útil para análises hipotéticas, testes de cenários e como ferramenta de apoio à decisão (Banks 1998, Brunner, Cross, McGhee, Levis e Whitney 1998, Negahban e Smith 2014). No DES, o tempo passa de acordo com a ocorrência de eventos específicos e a sequência de ações que as entidades realizam já é conhecida de antemão. O uso dessa abordagem de modelagem é melhor do que outras, como a baseada em agentes ou a dinâmica de sistemas, devido ao fato de que os processos modelados seguem processos sequenciais que podem ser adequadamente modelados sob esse paradigma. O uso de outras abordagens, como a baseada em agentes, por exemplo, é mais adequado para situações em que as entidades modeladas têm mais graus de liberdade e é necessário implementar a lógica por trás do processo de tomada de decisão pelo qual as entidades passam. No sistema modelado neste trabalho, isso não é necessário, o que nos dá uma estrutura mais flexível, fácil de manter e mais rápida do que aquela que pode ser obtida com uma técnica diferente.
Implementação
A metodologia apresentada na seção 3.1 foi aplicada ao problema de detecção e resolução de conflitos em aeroportos. Nas próximas seções, são apresentados os principais parâmetros do modelo de simulação e otimização e duas iterações da metodologia implementada com os respectivos resultados.
Parâmetros da metodologia
Os parâmetros envolvidos nessa metodologia podem ser classificados em três grupos: parâmetros controláveis, parâmetros de limite e parâmetros estocásticos. Os primeiros referem-se aos parâmetros relacionados ao problema em estudo e, portanto, são específicos do problema. Os parâmetros de limite estão relacionados ao próprio processo de otimização e, portanto, dependem do tipo de otimização utilizado. Os parâmetros controláveis fazem parte do modelo de otimização, pois representam as variáveis de decisão do problema. Os parâmetros estocásticos representam as fontes de estocasticidade do sistema, portanto, dependem do sistema em estudo. Nas seções a seguir, esses parâmetros são apresentados e discutidos. Os parâmetros controláveis e de limite são muito importantes, pois são os condutores da implementação da metodologia. Cada iteração da metodologia se baseia em uma configuração diferente desses parâmetros. Os parâmetros estocásticos são implementados pelo modelo de simulação, resultando em fatores-chave para a qualidade da metodologia. É importante escolhê-los e calibrá-los adequadamente. Neste trabalho, foi feita uma estimativa inicial para eles.
Parâmetros controláveis e de limite
Os parâmetros controláveis do problema de detecção e resolução de conflitos no aeroporto considerados neste trabalho são
- Velocidade de entrada no espaço aéreo: aumentar ou diminuir a velocidade da aeronave que entra no espaço aéreo para a aproximação final.
- Tempo de entrada no espaço aéreo: atrasar ou adiantar a aeronave que está entrando no espaço aéreo para a aproximação final.
- Tempo de retorno: atrasar as aeronaves em seus portões antes de partirem.
Os parâmetros de limite referem-se aos parâmetros da janela deslizante:
- Tamanho da janela: define o tamanho de cada subproblema resolvido pelo algoritmo.
- Tamanho do deslocamento: define o tamanho do deslocamento da janela e, portanto, a quantidade de variáveis de decisão que são atualizadas para cada subproblema.
Na Tabela 2, os parâmetros controláveis e de limite estão resumidos com seus respectivos valores usados para a solução inicial otimizada. Observe que os valores dos parâmetros tempo de entrada no espaço aéreo e tempo de recuo são discretizados de acordo com um intervalo de 5 segundos, enquanto a velocidade de entrada no espaço aéreo é discretizada de acordo com um intervalo de 1%. Os parâmetros de otimização são contínuos.
Parâmetros estocásticos
Os parâmetros estocásticos do problema de detecção e resolução de conflitos no aeroporto considerados neste trabalho são:
Tabela 2: Parâmetros controláveis e de limite.
| Velocidade de entrada no espaço aéreo | [-10% , 10%] |
| Tempo de entrada no espaço aéreo | [-5 min. , 30 min.] |
| Tempo de recuo | [0 , 15 min.] |
| Tamanho da janela | 3 horas. |
| Tamanho do turno | 30 min. |
- Desvio do tempo de entrada no espaço aéreo
- Desvio do tempo de deslocamento na pista de táxi
- Desvio do tempo de pushback
Na Tabela 3, os parâmetros estocásticos estão resumidos com seus respectivos valores usados no modelo de simulação. Observe que os parâmetros estocásticos são contínuos.
Tabela 3: Parâmetros estocásticos.
| Tempo de entrada no desvio do espaço aéreo | [-30 seg. , +30 seg.] |
| Desvio do tempo de pista de taxiamento | [-10% , +10%] |
| Desvio do tempo de retorno | [-60 seg. , +60 seg.] |
Experimentos
A metodologia proposta neste documento foi aplicada ao problema de detecção e resolução de conflitos em aeroportos. Duas iterações da metodologia são apresentadas neste trabalho. No início, é fornecida uma solução que representa o cronograma original; em seguida, é apresentada outra solução, desta vez implementando o processo de otimização, e as duas soluções são comparadas entre si. Depois que uma solução otimizada é encontrada pelo algoritmo de otimização, a incerteza é introduzida com o modelo de simulação, no qual foram concluídas 50 replicações para cada execução. O resultado da simulação é então analisado para testar a robustez da solução otimizada. Da mesma forma, uma segunda iteração foi conduzida com a execução do modelo de otimização, alterando alguns dos parâmetros da metodologia apresentados no item 4.1.1 e, em seguida, testando a nova solução gerada com o modelo de simulação. A programação original baseia-se em dados de tráfego real de um dia (7 de fevereiro de 2016), no aeroporto Charles de Gaulle de Paris, já que tanto o modelo de otimização quanto o de simulação modelaram as operações desse aeroporto específico. Nos gráficos a seguir, os resultados da programação inicial são ilustrados, mostrando muitos conflitos no espaço aéreo e nas pistas de pouso e decolagem e uma grande sobrecarga de capacidade na rede de pistas de taxiamento e nos terminais.
Com relação aos conflitos no espaço aéreo e nas pistas, eles foram calculados por hora, de modo que é possível ver em que parte do dia eles se concentram. A Figura 4(a) mostra que os conflitos no espaço aéreo no horário de pico ocorrem por volta das 8, 9, 12, 13 e 20 horas, variando entre 80 e 90 conflitos. Com relação aos conflitos nas pistas de pouso e decolagem (entrada e saída), as figuras 4(b) e 4(c) mostram que há muitos conflitos para elas. Na tendência de conflito da pista de pouso e decolagem, há picos entre 8 e 10 horas e também às 20 horas; na tendência de conflito da pista de pouso e decolagem, há picos entre 11 e 12 horas e também às 14 horas.
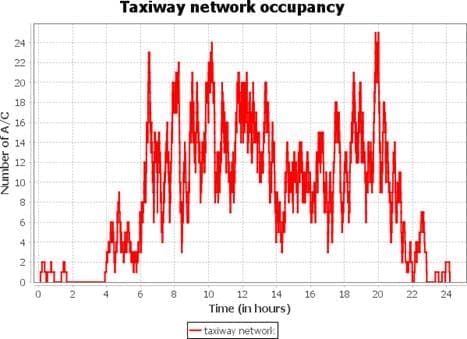
Com relação aos conflitos de saída de táxi, na Figura 5(a), pode-se observar que há uma sobrecarga na capacidade, que é definida como 18, das 9 às 14 horas e das 19 às 21 horas, com um pico máximo de 25 por volta das 21 horas. A Figura 5(b) mostra a ocupação para os três terminais considerados, onde, especialmente para o terminal 1 (capacidade 11), há uma sobrecarga constante das 6 às 21 horas.
Primeira Iteração
De acordo com o procedimento metodológico, na primeira etapa de cada iteração, o modelo de otimização é executado e uma solução otimizada é obtida a partir dele. Nesse caso, após a execução do modelo de otimização, foi encontrado um cenário com zero conflitos para os componentes do espaço aéreo e do solo. As Figuras 6(a) e 6(b) mostram


A tendência de ocupação durante o dia para a rede de pistas de táxi e terminais, onde se pode notar que não há sobrecarga de capacidade.
A primeira iteração é concluída com a execução da solução otimizada no modelo de simulação. Na Figura 7, são ilustradas as tendências de conflitos por hora para o espaço aéreo e as pistas.
Quando a incerteza é incluída, pode-se observar que, apesar de a solução de otimização apresentar um cenário sem conflitos, surgem novos conflitos. Especificamente para o espaço aéreo, há um pico de 5 conflitos médios por hora às 9 horas, e alguns outros conflitos se espalham durante o dia (consulte a Figura 7(a)). Com relação à pista de pouso e decolagem, pode-se ver que ela não é muito afetada pela incerteza, pois o pico médio de conflitos por hora é quase 2 (consulte a Figura 7(b)). A pista de saída, por outro lado, é mais afetada pela incerteza. Nesse caso, há muitos picos médios de conflito por hora durante o dia, 10 entre 11 e 12 horas, 12 entre 14 e 15 horas e 9 às 22 horas (consulte a Figura 7(c)). Com relação à sobrecarga do componente terrestre, os terminais não foram afetados pela incerteza, pois não houve sobrecarga de capacidade para eles; a sobrecarga média da capacidade máxima da pista de táxi foi de 2,05.
Segunda iteração
Uma segunda iteração é realizada porque os resultados da primeira iteração mostraram a presença de conflitos após a inclusão da incerteza. Nessa segunda iteração, o modelo de otimização foi executado ajustando alguns dos parâmetros controláveis ou de limite, de modo a obter uma nova solução a ser testada com o modelo de simulação. Nesse caso, ao executar o modelo de otimização, uma nova solução foi obtida alterando o tamanho da janela da abordagem de otimização de janela deslizante de uma janela de 3 horas para uma janela de 2 horas. Essa escolha foi justificada pelo fato de que, muitas vezes, quando o tamanho da janela é muito longo, o algoritmo considera muito cedo a informação de alguns voos que estão muito à frente na programação, o que pode levar a uma perda da dinâmica
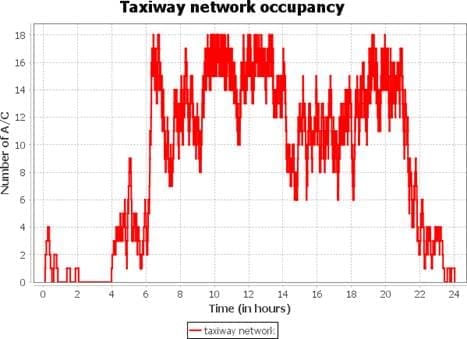

Figura 6: Ocupação do solo após a otimização, primeira iteração.

A vantagem da abordagem que afeta a qualidade da solução. Portanto, testar um tamanho de janela menor pode levar a uma solução mais robusta. Os resultados da nova solução são mostrados na Tabela 4.
Tabela 4: Resultados da otimização, segunda iteração.
| Conflitos no espaço aéreo | 0 |
| Conflitos na pista (entrada e saída) | 1 |
| Rede de pistas de táxi (sobrecarga máxima + sobrecarga média) | 0 |
| Terminal 1 (sobrecarga máxima + sobrecarga média) | 1.04 |
| Terminal 2 (sobrecarga máxima + sobrecarga média) | 0 |
| Terminal 3 (sobrecarga máxima + sobrecarga média) | 1.04 |
Como se pode notar, essa solução oferece um cenário quase sem conflitos, já que alguns conflitos aparecem para as pistas de pouso e decolagem e para os terminais. Portanto, do ponto de vista da otimização, essa solução não é ótima, mas subótima. Nas figuras 8(a), 8(b) e 8(c) estão ilustrados os resultados obtidos após testar essa solução por meio do modelo de simulação. Na Figura 8(a), pode-se observar que três picos de 4, 5 e 7 conflitos horários médios no espaço aéreo são encontrados às 6, 10 e 12 horas, respectivamente. Com relação aos conflitos horários médios na pista, como pode ser visto na figura 8(b), há dois picos de 1,6 e 2,1 às 8 e 12 horas, respectivamente. Os resultados da pista de saída registram apenas um pico de 14 conflitos médios por hora às 14 horas.
Na tabela 5 estão resumidos os resultados das duas iterações. Observando a segunda e a terceira coluna, em relação à primeira e à segunda iteração, nota-se que a segunda iteração melhora a média de conflitos na saída da pista de 89,9 para 85,32, mas não melhora a média de conflitos no espaço aéreo. Os valores dos outros componentes, pista de pouso e decolagem, pista de taxiamento e terminais, são estáveis entre a primeira e a segunda iteração.
O resultado esperado da metodologia deve ser a diminuição progressiva do número de conflitos após cada iteração e, ao mesmo tempo, a obtenção de uma solução em que os conflitos sejam equilibrados entre todos os componentes.
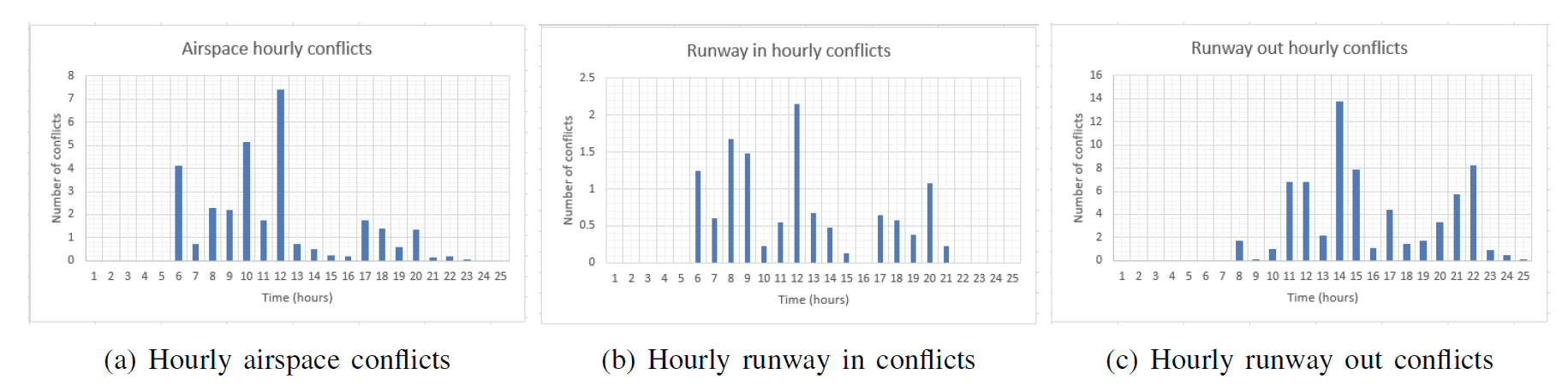
Tabela 5: Comparação entre os resultados das duas iterações.
| Primeira iteração | Segunda iteração | |
|
Média de conflitos no espaço aéreo |
19.60 | 26.77 |
|
Média de conflitos na pista |
9.30 | 9.50 |
|
Média de conflitos fora da pista |
89.90 | 85.32 |
|
Média de sobrecarga na pista de táxi |
2.05 | 2.06 |
|
Sobrecarga média dos terminais |
0 | 0 |
os componentes. Nesse caso, após duas iterações, pode-se observar que algumas melhorias foram alcançadas para algumas partes dos sistemas, especialmente para a saída da pista, enquanto que para o espaço aéreo, a metodologia não foi capaz de fazer melhorias. Com relação aos componentes terrestres, os resultados confirmaram que eles não foram muito afetados pela variabilidade, o que significa que poderiam ser bem previstos. Entretanto, a interpretação do resultado após duas iterações, quando o desempenho geral do sistema aeroportuário é considerado, aponta que a solução da segunda iteração é mais equilibrada do que a solução da primeira iteração, o que representa um aprimoramento em termos de robustez. Com a implementação de mais iterações dessa metodologia, espera-se obter ainda mais melhorias na robustez das soluções.
O impacto nos negócios
Conclusão e etapas futuras
Neste documento, foi apresentada uma estrutura para o aprimoramento da robustez de soluções otimizadas aplicadas ao problema de detecção e resolução de conflitos em aeroportos. Os resultados demonstram a viabilidade do conceito de combinar as duas metodologias para fornecer soluções mais robustas. A incerteza confirmou ser um grande incômodo quando aplicada a uma solução otimizada. Os conflitos no espaço aéreo e na pista foram os mais afetados após a inclusão da variabilidade no sistema, enquanto os componentes terrestres foram menos sensíveis a ela. A metodologia, implementada iterativamente, conseguiu reduzir os conflitos na saída da pista, mas não foi muito eficaz para os conflitos no espaço aéreo. Em geral, após duas iterações, a metodologia alcançou uma solução mais equilibrada. A discussão adicional seria sobre como implementar uma abordagem cíclica para que possamos ajustar a robustez da solução obtida pela combinação das duas abordagens. Outros estudos podem ser conduzidos para a escolha dos parâmetros a serem ajustados em cada iteração, a fim de torná-la mais eficaz e eficiente. Outro aspecto que pode ser estudado como um desenvolvimento futuro da metodologia é a escolha dos valores dos parâmetros estocásticos, que pode ser feita, por exemplo, pelo processamento de dados históricos.
AGRADECIMENTOS
Os autores gostariam de agradecer à Academia de Aviação da Universidade de Ciências Aplicadas de Amsterdã, à Sociedade Holandesa de Simulação Benelux e à EUROSIM pela divulgação dos resultados deste trabalho.