Le défi
par Rie Gaku (St. Andrew's University) et Soemon Takakuwa (Chuo University)
Présenté lors de la Conférence d'hiver sur la simulation 2018
Les systèmes de stockage et de déstockage automatisés à mini-charge de type navette (SVM-AS/RS) permettent un stockage et un déstockage rapides, améliorant la fonction tampon des opérations de stockage et de tri flexibles. Les systèmes examinés dans cette étude se composent de véhicules navettes légers installés à chaque niveau de stockage, de chariots élévateurs de stockage et de déstockage, de convoyeurs à étages reliant les chariots élévateurs et les véhicules navettes, et de convoyeurs pour les allées entrantes et sortantes. Tout d'abord, une méthode est démontrée pour déterminer si les élévateurs ou les véhicules-navettes sont les goulots d'étranglement dans un système donné. Il est ensuite montré comment la simulation peut être utilisée pour analyser précisément les performances de différents agencements, en tenant compte des règles d'attribution des emplacements de stockage et des priorités d'exploitation. Ce travail montre que les indicateurs clés de performance dérivés des résultats d'une telle analyse de simulation sont des outils précieux pour la sélection de l'ensemble de spécifications le plus efficace et le plus économique pour un SVM-AS/RS dans des conditions données de priorités d'exploitation.
Introduction
Les installations logistiques modernes ne sont pas seulement utilisées pour le stockage des matières premières, des pièces et des produits finis, mais jouent également un rôle de tampon qui permet un stockage et un tri flexibles avant l'expédition, le prélèvement, le tri, la palettisation ou la fusion. Récemment, les systèmes de stockage et de récupération automatisés de type véhicule-navette (SVMAS/RS) ont été utilisés dans les domaines susmentionnés pour stocker et récupérer rapidement des stocks tampons de cartons, de bacs et de plateaux par groupe ou par séquence et ainsi répondre aux besoins des clients en matière de services de livraison plus rapides.
L'analyse des performances d'un système de stockage et de récupération automatisé (AS/RS) est un défi complexe pour les gestionnaires logistiques opérant dans un environnement logistique dynamique (Gaku et Takakuwa 2017). Pour améliorer les performances du système, les exigences pour les AS/RS dynamiques, telles que la configuration du système, l'estimation du temps de trajet, l'affectation du stockage, la localisation du point d'habitation et le séquençage des demandes, augmentent et doivent être développées pour surmonter les horizons de planification finis (Roodbergen et Vis 2009). La simulation offre un moyen précieux de modéliser les performances d'un tel système de manière précise et réaliste (Takakuwa 1989 ; Takakuwa 1993).
Les simulations sont couramment utilisées comme outils d'aide à la décision pour les opérations logistiques afin de garantir la continuité des opérations. La modélisation et l'analyse par simulation des opérations AS/RS à grande échelle ont fait l'objet de nombreuses études (Takakuwa 1989 ; Takakuwa 1994 ; Takakuwa 1995). Ning et al. (2016) ont souligné que les simplifications ne sont pas nécessaires dans les modèles de simulation de la conception des rayonnages dans un système de stockage et de déstockage basé sur des navettes à plusieurs ascenseurs. Une méthodologie pratique pour caractériser un système dynamique avec plusieurs ascenseurs et navettes est présentée pour résoudre le problème d'ordonnancement des ascenseurs, c'est-à-dire quel ascenseur va traiter quelle demande (de stockage ou de déstockage), et dans quel ordre (Carlo et Vis 2012). Takakuwa (1993), quant à lui, a mené des analyses d'optimisation de simulation de la rentabilité sur la base des spécifications opérationnelles d'un système de véhicule guidé automatisé (AGV) à camions bouclés et, plus tard, Takakuwa (1996) a proposé une approche de modélisation basée sur les modules pour générer des programmes de simulation pour un système AS/RS complexe et à grande échelle. Kuo et al. (2007) ont utilisé un modèle de temps de cycle efficace en termes de calcul pour estimer l'utilisation des véhicules des SVA/SR à charge unitaire utilisant la technologie des véhicules autonomes en vue d'identifier la gamme des profils de conception justifiant une évaluation et une validation plus approfondies basées sur la simulation. Goozen et al. (2016) ont développé une heuristique d'ordonnancement pour assigner des tâches aux navettes de manière à minimiser le nombre d'occurrences hors séquence et à maximiser la capacité de débit d'un système de navettes itinérantes complet (FRS). Toutefois, un système de navettes itinérantes est généralement considéré comme plus adapté aux produits à faible rotation dans les centres de distribution de détail et de gros. Les calculs de performance de débit sont effectués pour un AS/RS en mettant en œuvre une variété de conceptions d'entrepôts dans la pratique en tenant compte des caractéristiques d'exploitation (Lerher et al. 2015 ; Lerher et al. 2016). Les deux études soulignent que la simulation peut aider les concepteurs d'entrepôts à analyser l'efficacité d'un agencement au regard des propriétés cinématiques des AS/RS.
De nombreux agencements possibles doivent être évalués et sélectionnés lors de la conception d'un SVM-AS/RS à grande échelle. De nombreux paramètres doivent être déterminés, tels que les spécifications du SVM-AS/RS, le nombre de véhicules navettes et le nombre d'élévateurs entrants/sortants, en tenant compte de la priorité à accorder aux différentes opérations en fonction de la fréquence de manipulation des articles de différentes manières. Il est essentiel de modéliser les différentes solutions et d'effectuer des expériences de simulation sur un certain nombre de modèles afin de garantir le maintien d'opérations logistiques continues. Cet article va au-delà des études existantes en évaluant l'efficacité et l'efficience des SVM-AS/RS dans le cadre d'aménagements différents grâce à des simulations qui analysent les performances dynamiques des systèmes et prennent en compte les priorités d'exploitation. Les résultats de ces simulations peuvent être utilisés pour faciliter la prise de décision dans le choix des spécifications appropriées pour les SVM-AS/RS complexes et dynamiques, tant du point de vue de l'efficacité que de celui de l'économie.
Le présent document est organisé comme suit : La section 2 présente les systèmes SVM-RS/AS avec leurs flux de matières et leurs règles d'allocation de stockage. La section 3 décrit l'analyse de simulation avec la logique du modèle, les paramètres appliqués et les principaux résultats, ce qui conduit à une comparaison des coûts et de l'efficacité pour des configurations alternatives. Un résumé et des conclusions sont présentés à la section 4.
La solution
Systèmes de mini-chargements as/rs de type navette
Vue générale des SVM-AS/RS
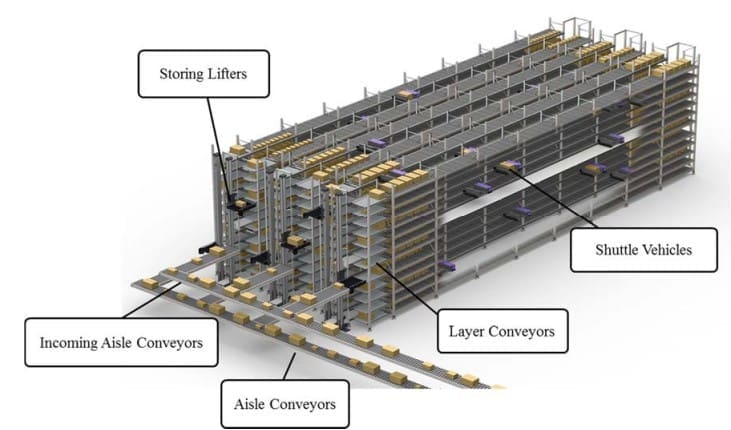
La figure 1 présente une vue générale des SVM-AS/RS. Les SVM-AS/RS examinés dans cette étude se composent de plusieurs sous-systèmes : un véhicule-navette installé à chaque niveau, des élévateurs de stockage et de déstockage, des convoyeurs à étages reliant les élévateurs et les véhicules-navettes, et des convoyeurs d'allée entrants et sortants. Le stockage et le déstockage sont effectués depuis et vers les rayonnages par des véhicules-navettes légers qui ne peuvent se déplacer que dans le sens horizontal. Les rayonnages sont reliés aux élévateurs de stockage et de déstockage par les convoyeurs à étages. Les convoyeurs des allées sortantes sont reliés à la zone de contrôle et d'emballage.
Flux opérationnel des SVM-AS/RS
Lorsqu'une mini-charge arrive sur un convoyeur d'allée entrant, elle est transférée sur un convoyeur à étages par un élévateur de stockage. Si aucun élévateur n'est disponible à ce moment-là, l'article s'arrête et attend au bout du convoyeur de l'allée d'arrivée jusqu'à ce qu'un élévateur de stockage soit libre. Une fois sur le convoyeur à étages, la mini-charge se déplace vers son rayonnage de destination, sur lequel elle est transférée par un véhicule navette léger. Dans le cas d'une mini-charge sortante, la charge est prélevée sur son rayonnage par une navette légère, se déplace sur un convoyeur à étages, puis est transférée sur le convoyeur de l'allée sortante par un élévateur de prélèvement.
Les priorités des opérations sont un facteur important pour l'utilisation efficace des navettes légères et des élévateurs de stockage et de déstockage. En général, les opérations de stockage sont plus prioritaires que les opérations de déstockage. Cela signifie que les mini-charges entrantes bénéficient d'un traitement préférentiel par rapport aux mini-charges sortantes. Il est également possible d'alterner les opérations de déstockage et de stockage de manière cyclique.
Règles d'attribution des emplacements de stockage pour les charges entrantes et sortantes
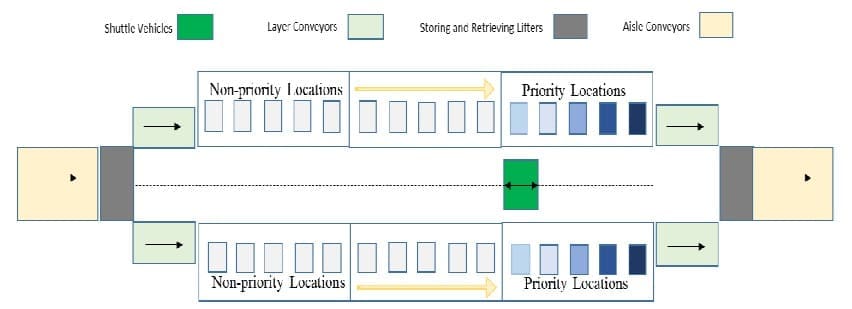
La règle d'attribution des emplacements de stockage est un facteur essentiel à prendre en compte lorsqu'il s'agit de fournir une mémoire tampon flexible pour des opérations de stockage et de tri rapides avec les SVM-AS/RS. Il existe deux règles générales d'allocation des emplacements de stockage dans les SVM-AS/RS, et la règle la plus appropriée dépend de la fréquence relative des opérations d'entrée et de sortie. La première, la "règle d'allocation prioritaire", est illustrée à la figure 2. Elle est la plus appropriée lorsque les opérations sortantes sont effectuées dans un court laps de temps. Les emplacements de stockage proches des convoyeurs à étages sont attribués et classés par ordre de priorité pour les charges entrantes, de manière à réduire au minimum le temps nécessaire au transfert sortant. L'autre option consiste à attribuer de manière aléatoire des emplacements de stockage parmi les emplacements disponibles aux différents niveaux. Cette règle, connue sous le nom de "règle d'allocation aléatoire basée sur l'équilibre des niveaux", est utilisée dans le cadre de cette étude et des expériences de simulation présentées ici.
Analyse de simulation
Énoncé du problème
De nombreux paramètres doivent être pris en compte lors de la conception de SVM-AS/RS à grande échelle. L'efficacité du système dépend de spécifications telles que le nombre et la taille des composants du système, c'est-à-dire les véhicules navettes légers, les élévateurs de stockage et de récupération, les convoyeurs de couches reliant les élévateurs et les véhicules navettes, et les convoyeurs d'allées entrantes et sortantes. Ces paramètres doivent être déterminés avant le début des opérations afin de garantir un fonctionnement logistique continu.
Pour démontrer ce processus, une analyse de simulation est effectuée sur un échantillon de SVM-AS/RS candidats. Il y a deux étapes pour déterminer les spécifications appropriées des SVM-AS/RS par le biais de l'analyse de simulation. La première consiste à spécifier l'agencement général. Cette étude définit cinq configurations possibles répondant à la condition d'avoir besoin d'au moins 500 baies, comme suit :
Type A : banque : 2, baie : 65, niveau : 4 = 520 (racks)
Type B : banque : 2, baie : 50, niveau : 5 = 500 (baies)
Type C : banque : 2, baie : 45, niveau : 6 = 540 (baies)
Type D : banque : 2, baie : 40, niveau : 7 = 560 (baies)
Type E : banque : 2, baie : 35, niveau : 8 = 560 (baies)
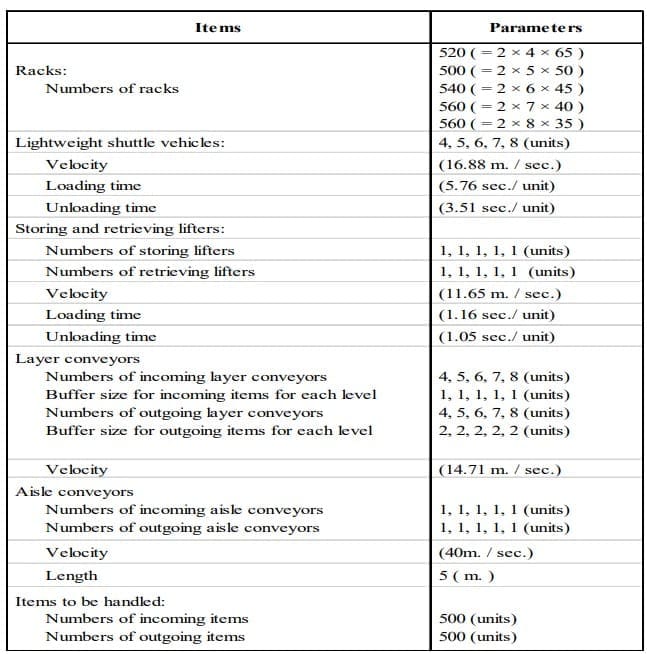
La deuxième étape consiste à déterminer les spécifications plus détaillées des SVM-AS/RS. Il s'agit notamment du nombre et de la taille des tampons des convoyeurs des couches entrantes et sortantes et du nombre de véhicules navettes. Un défi particulier à ce stade est de déterminer le nombre optimal ou raisonnable de véhicules-navettes à stationner à chaque niveau pour transporter le nombre prévu d'articles entre les élévateurs et les rayonnages de manutention, tant du point de vue de l'efficacité que de celui de l'économie. En fonction de la fréquence de manutention des articles et des priorités opérationnelles, les paramètres types énumérés dans le tableau 1 sont utilisés comme conditions expérimentales pour les expériences de simulation des cinq types de SVM-AS/RS, du type A au type E.
Logique de simulation
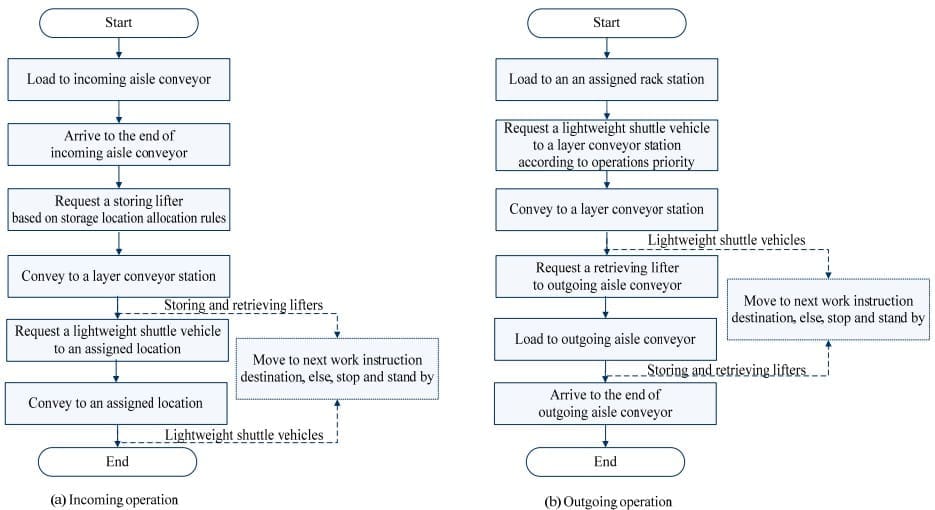
Un modèle de simulation des opérations AS/RS des SVM-AS/RS a été créé à l'aide du logiciel de simulation Simio (Kelton et al. 2017). Cette étude prend en compte deux types essentiels de processus de flux de matières généralement exécutés par les SVM-AS/RS, à savoir les flux entrants et les flux sortants, comme le montre la figure 3. Chaque flux de processus contient une séquence d'activités réalisées par les navettes légères installées à chaque niveau, les élévateurs de stockage et de récupération, les convoyeurs de couches et les convoyeurs d'allées entrantes et sortantes. Les flux de processus essentiels sont identifiés afin de caractériser les flux d'opérations de manutention des SVM-AS/RS.
Dans un SVM-AS/RS, les véhicules navettes légers et les élévateurs de stockage et de déstockage doivent être manipulés conformément aux règles de priorité des opérations. Contrairement aux AS/RS traditionnels, dans les SVM-AS/RS, les articles sont conservés en stock dans l'entrepôt pendant une période relativement courte. Cette étude prend en compte deux stratégies générales de priorité des opérations dans les expériences de simulation. Dans la première, "Storage Operations First" (SOF), les mini-chargements entrants sont traités de manière préférentielle par rapport aux mini-chargements sortants. Les opérations de récupération ne sont donc lancées qu'une fois les opérations entrantes terminées. Dans l'autre, "Opérations alternées" (AO), les opérations peuvent alterner entre les opérations de déstockage et de stockage de manière cyclique.
Paramètres de simulation
Avant d'effectuer les analyses de simulation, le nombre maximal de charges de déstockage sortantes et de stockage entrantes par heure, c'est-à-dire I (unités), et les goulets d'étranglement conformément aux règles de priorité des opérations sont estimés à l'aide des deux équations suivantes :


où
a : temps de déplacement unidirectionnel d'un élévateur de stockage/récupération depuis la position de base jusqu'au point médian (s)
b : temps de chargement sur un élévateur (s)
c : temps de déchargement d'un élévateur (s)
n : nombre de véhicules navettes (unités)
T : durée de l'opération (par exemple, 3 600 s)
x : temps de déplacement aller d'un véhicule-navette de la position de base au point médian (s)
y : temps de chargement d'un véhicule-navette (s)
z : temps de déchargement d'un véhicule-navette (s)
Les équations (1) et (2) sont appliquées respectivement aux règles AO et SOF. Le terme (2a+b+c) dans les dénominateurs des deux équations est la durée prévue d'un aller-retour d'un engin de levage et d'un véhicule-navette selon les deux règles de priorité d'exploitation. Le terme (2x+y+z) est la durée prévue d'un aller-retour pour un véhicule-navette, et n unités de véhicules-navettes sont utilisées pour transporter à la fois les charges sortantes de récupération et les charges entrantes de stockage. Toutefois, le temps de traitement global prévu pour un aller-retour de véhicule-navette est différent dans les équations (1) et (2). Selon la règle AO, le temps de traitement global prévu pour les véhicules-navettes est de 2(2x+y+z)/n, comme le montre l'équation (1). Au dénominateur de l'équation (2), étant donné que les opérations de déstockage sont lancées à la fin du stockage de la charge entrante, le temps de traitement global prévu est de (2x+y+z)/n. D'après les deux équations ci-dessus, le goulot d'étranglement des systèmes AS-RS de cette étude sera soit un véhicule de levage, soit un véhicule de navette, en fonction des spécifications du système AS/RS. Le temps de cycle prévu est le dénominateur de l'équation (1) ou (2).
Les temps des véhicules de levage et de navette utilisés pour les équations (1) et (2) sont mesurés à partir d'un système AS-RS réel par le biais d'une étude de temps. Le tableau 2 présente des échantillons de données sélectionnées pour les cinq principales configurations possibles, qui donnent un aperçu des goulets d'étranglement dans les systèmes AS/RS avec différentes spécifications de conception. Les navettes sont les goulets d'étranglement pour le type A selon la règle SOF et pour les types A, B et C selon la règle AO. Inversement, les élévateurs sont les goulets d'étranglement pour les types B-E selon la règle SOF et pour les types D et E selon la règle AO. Les cellules grisées représentent le temps de traitement global des véhicules-navettes avec différentes règles de priorité d'exploitation où les goulets d'étranglement sont les véhicules-navettes.
Tableau 2 : Goulots d'étranglement dans chaque système AS-RS

Comparaison des indicateurs clés de performance pour des configurations alternatives
La simulation est un outil puissant pour analyser les performances d'un système AS-RS à grande échelle, indépendamment de la taille ou de la complexité du système. Trente expériences de simulation indépendantes ont été réalisées pour chaque règle de priorité d'exploitation et pour chacun des types de configuration décrits à la section 3.3. Certains indicateurs clés de performance (ICP) ont été collectés à partir des résultats des modèles de simulation et comparés :
- Temps total de flux pour les opérations de stockage et de déstockage selon les règles SOF et AO
- Temps de cycle moyen pour les opérations de stockage et de déstockage dans le cadre de la règle SOF.
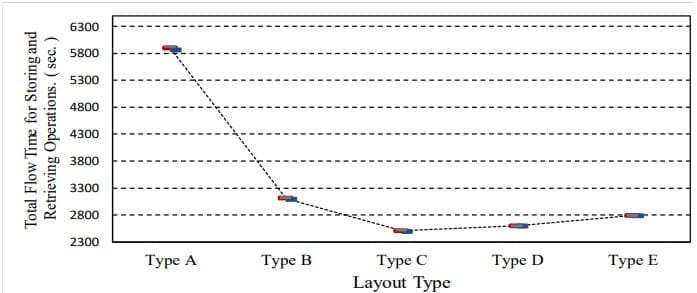
Les ICP susmentionnés peuvent être utilisés comme mesures de la performance des configurations de système désignées afin d'évaluer les spécifications optimales à utiliser pour chaque règle de priorité d'opération. La figure 4 montre l'intervalle de confiance à 95 % sur le temps de flux total moyen pour les opérations de stockage et de déstockage dans le cadre de la règle AO dans les simulations. Le type C peut être considéré comme le plus efficace des cinq types d'agencement à cet égard.
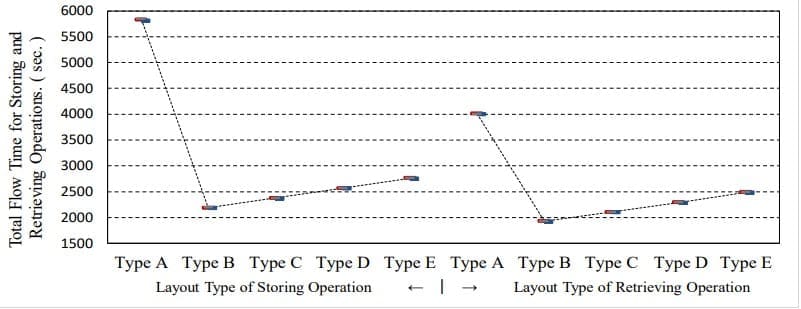
La figure 5, quant à elle, représente l'intervalle de confiance à 95 % de la durée totale moyenne des opérations de stockage et de déstockage dans le cadre de la règle SOF dans les simulations. Elle montre que le type B a le temps de flux moyen le plus court des cinq alternatives dans le cadre de cette règle.
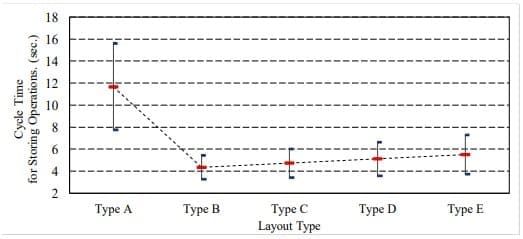
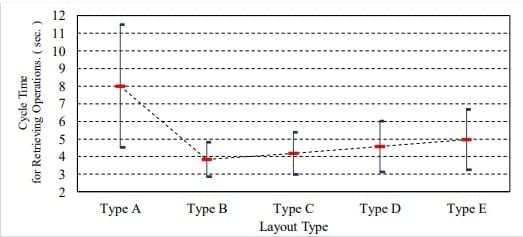
Le temps de cycle pour les opérations de stockage et de déstockage, tel qu'il ressort des simulations, est utile lorsqu'il s'agit d'étudier les méthodes permettant d'améliorer la satisfaction des clients en réduisant le délai entre la commande de marchandises et la livraison au client. Les résultats concernant le temps de cycle pour les opérations de stockage et de déstockage dans le cadre de la règle SOF sont présentés dans les figures 6 et 7. On constate que le type B est le plus efficace des cinq types d'agencement. La variabilité du temps de cycle entre les différentes implantations confirme qu'il s'agit d'une mesure de performance précieuse pour évaluer l'efficacité de la livraison aux clients dans un environnement logistique dynamique. On peut également constater que l'équation (2) donne un aperçu préliminaire du temps de cycle des opérations, car elle donne des résultats proches de ceux de l'analyse de simulation : les résultats du temps de traitement global des élévateurs avec les règles SOF pour les types B à E dans le tableau 3 sont de 3,93, 4,27, 4,61 et 4,95, très proches des valeurs observées dans les résultats de la simulation dans les figures 6 et 7.
Comparaison des coûts et de l'efficacité des différentes configurations possibles
Après avoir examiné et analysé les configurations possibles du SVM-AS/RS, il est nécessaire de déterminer le système optimal sur la base d'une analyse économique des alternatives. L'analyse coût-efficacité a été utilisée pour comparer les coûts associés aux différentes configurations du système envisagées dans le cadre de cette étude. Lors de la comparaison des coûts entre les différentes solutions, il est nécessaire de collecter les informations relatives aux coûts : données d'échantillonnage sur (1) le coût initial ; (2) le coût annuel de maintenance ; (3) la valeur de récupération ; (4) la durée de vie ; (5) le coût annuel uniforme de fin d'année (unacost). Un taux d'intérêt annuel de 10% est choisi pour ce cas. Ces données sont présentées dans le tableau 3.
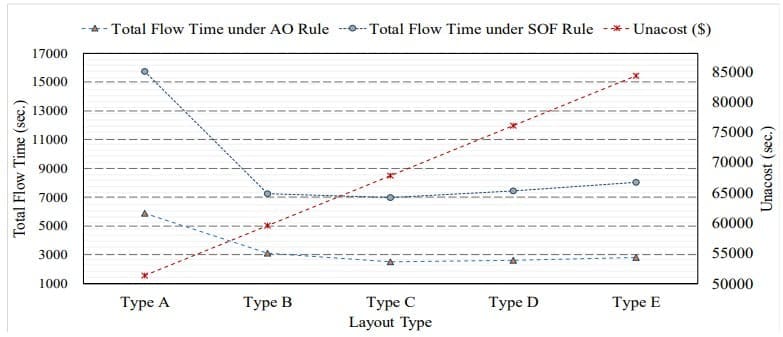
La figure 8 montre à la fois le temps d'écoulement total pour les opérations de stockage et de déstockage et le coût unitaire pour les différents schémas d'implantation. D'un point de vue économique, le tableau 3 et la figure 8 montrent que le type A est la solution la plus économique. Du point de vue de l'efficacité, cependant, les temps de circulation totaux des types B à E sont inférieurs à ceux du type A. Étant donné que ces quatre types ont des temps de circulation totaux très similaires selon les règles AO et SOF, une analyse factorielle de la variance a été réalisée pour mieux déterminer leur efficacité relative. Dans ce cas, on peut conclure que le type d'aménagement influe sur le temps de parcours total pour les aménagements de type B à E ; les types C et B peuvent être considérés comme les plus efficaces dans le cadre des règles AO et SOF, respectivement. Toutefois, si la différence d'efficacité est faible, il convient de souligner que l'analyse coût-efficacité, c'est-à-dire le compromis entre l'efficacité et le coût, peut être appliquée à la gestion des SVM-AS/RS.
Tableau 3 : Comparaisons pour l'analyse coût-efficacité.

L'impact sur les entreprises
Conclusion
Le présent document montre comment les résultats de la simulation peuvent apporter une aide précieuse à la prise de décision concernant les spécifications de conception des SVM-AS/RS complexes et dynamiques. Tout d'abord, une méthode permettant d'identifier si les élévateurs ou les véhicules navettes représentent le goulot d'étranglement dans différentes conceptions d'aménagement est proposée. Il est ensuite démontré comment des expériences de simulation peuvent être réalisées pour examiner les performances dynamiques de différents agencements, en tenant compte de la priorité des opérations. Le temps d'écoulement total et le temps de cycle sous différentes règles de priorité d'opération sont mis en évidence en tant qu'outils permettant de discriminer entre différentes spécifications de conception de système. Des analyses de l'efficacité et des coûts d'installation et d'exploitation peuvent alors être effectuées, ce qui constitue une aide supplémentaire pour une meilleure prise de décision concernant l'agencement des conceptions alternatives d'AS/RS. La procédure proposée est appliquée à un cas type afin de confirmer son efficacité.
Remerciements
Cette recherche est soutenue par la subvention pour jeunes scientifiques (B) de la Société japonaise pour la promotion de la science (JSPS) (numéro de subvention : 17K13801).
Biographies des auteurs
RIE GAKU est professeur associé à la Graduate School of Business Administration de l'université St. Andrew, Osaka, Japon. Elle a obtenu sa maîtrise et son doctorat en économie à l'université de Nagoya en 2006 et 2010. Ses recherches portent sur la prévision de la demande à l'aide de la technologie d'exploration de données et sur l'analyse de simulation des systèmes de fabrication et de logistique. Ses recherches actuelles portent sur l'optimisation des systèmes logistiques. Son adresse électronique est r-gaku@andrew.ac.jp.
SOEMON TAKAKUWA est professeur à l'université de Chuo et professeur émérite à l'université de Nagoya au Japon. Il a obtenu sa licence et sa maîtrise en génie industriel à l'Institut de technologie de Nagoya en 1975 et à l'Institut de technologie de Tokyo en 1977, respectivement. Il a obtenu un doctorat en génie industriel à l'université d'État de Pennsylvanie. Il est également titulaire d'un doctorat en économie de l'université de Nagoya et d'un P.E. en génie industriel. Il est membre correspondant de l'Académie internationale d'ingénierie en Russie. Ses recherches portent sur l'optimisation des systèmes de fabrication et de logistique, les systèmes d'information de gestion et l'analyse de simulation de ces systèmes dans le contexte des hôpitaux. Il a préparé les éditions japonaises de Introduction to Simulation using SIMAN, Simulation with ARENA, et Simio and Simulation : Modeling, Analysis, Applications. Son adresse électronique est takakuwa@indsys.chuo-u.ac.jp.
Références
Gaku R. et S. Takakuwa. 2017. "Simulation Modeling of Shuttle Vehicle-type Mini-load AS/RS Systems for E-commerce Industry of Japan". In Proceedings of the 2017 Winter Simulation Conference, édité par W. K. V. Chan et al, 3174-3183. Piscataway, New Jersey : IEEE.
Goozen, M. P., I. J. Adan, J. W. Heling, et B. Wijngaarden. 2016. "Task Scheduling in a Full Roaming Shuttle System". In Proceedings of the 2016 Winter Simulation Conference, édité par G. W. Evans et al, 2844-2854. Piscataway, New Jersey : IEEE.
Héctor J. Carlo et Iris F. A. Vis. 2012. "Sequencing Dynamic Storage Systems with Multiple Lifts and Shuttles". International Journal of Production Economics 140(2):844-853.
Kelton, W. D., J. S. Smith, et D. T. Sturrock. 2017. Simio et Simulation : Modeling, Analysis, Applications. 4e éd. Simio LLC.
Kuo, P. H., A. Krishnamurthy, et C. J. Malmborg. 2007. "Design Models for Unit Load Storage and Retrieval Systems Using Autonomous Vehicle Technology and Resource Conserving Storage and Dwell Point Policies". Applied Mathematical Modelling 31(10):2332-2346
Lerher T., B. Y. Ekren, G. Dukic, et B. Rosi. 2015. "Travel Time Model for Shuttle-based Storage and Retrieval Systems". International Journal of Advanced Manufacturing Technology 78(9-12):1705- 1725.
Lerher T., B. Y. Ekren, Z. Sari, et B. Rosi. 2016. "Method for Evaluating the Throughput Performance of Shuttle Storage and Retrieval Systems" (Méthode d'évaluation du rendement des systèmes de stockage et de récupération des navettes). Technical Gazette 23(3):715-723.
Ning, Z., L. Lei, Z. Saipeng, et G. Lodewijks. 2016. "An Efficient Simulation Model for Rack Design in Multi-elevator Shuttle-based Storage and Retrieval System". Simulation Modelling Practice and Theory 67:100-116
Roodbergen K. J. et I. F. A. Vis. 2009. "A Survey of Literature on Automated Storage and Retrieval Systems". European Journal of Operational Research 194(2):343-362.
Takakuwa, S. 1989. "Module Modeling and Economic Optimization for Large-scale AS/RS". In Proceedings of the 1989 Winter Simulation Conference, édité par E. A. MacNair et al, 795-801. Piscataway, New Jersey : IEEE.
Takakuwa, S. 1993. "Design and Cost-effectiveness Analysis of Large-scale AS/RS-AGV Systems". Dans Proceedings of the 1993 Winter Simulation Conference, édité par G. W. Evans et al, 851-856. Piscataway, New Jersey : IEEE.
Takakuwa, S. 1994. "Precise Modeling and Analysis of Large-scale AS/RS". Dans Proceedings of the 1994 Winter Simulation Conference, édité par J. D. Tew et al, 1001-1007. Piscataway, New Jersey : IEEE.
Takakuwa, S. 1995. "Flexible Modeling and Analysis of Large-scale AS/RS-AGV Systems". Dans Proceedings of the 1995 Winter Simulation Conference, édité par C. Alexopoulos et al, 873-880. Piscataway, New Jersey : IEEE.
Takakuwa, S. 1996. "Efficient Module-based Modeling for a Large-scale AS/RS-AGV System". In Proceedings of the 1996 Winter Simulation Conference, édité par J. M. Charnes et al, 1141-1148. Piscataway, New Jersey : IEEE.