El desafío
por Maojia P. Li y Michael E. Kuhl (Instituto de Tecnología de Rochester)
Tal y como se presentó en la Conferencia de Simulación de Invierno de 2017
Las estrategias de control eficaces para los vehículos de guiado automático (AGV) son importantes para las empresas que operan sistemas de fabricación flexibles en términos de maximización de la productividad. En este artículo, diseñamos y analizamos Pickup-or-Delivery-En-Route (PDER), un algoritmo de despacho AGV de carga múltiple. PDER es una regla de determinación de tareas que permite a un vehículo parcialmente cargado que viaja a un destino de entrega recoger y/o entregar cargas que, de otro modo, el vehículo pasaría de largo en ruta hacia el destino original. Realizamos un experimento basado en simulaciones para evaluar la eficacia del algoritmo PDER. Los resultados indican que el PDER puede producir impactos positivos significativos en el rendimiento y el tiempo en el sistema en sistemas de fabricación flexibles que utilizan AGVs de carga múltiple.
1 Introducción
Con los constantes cambios en el entorno empresarial, las preferencias de los clientes y la tecnología, las empresas ya no pueden esperar rendimientos superiores fabricando productos estandarizados. Para hacer frente a problemas como la adaptación de los productos, la ampliación de la gama de productos ofrecidos y la disminución de las cantidades de los pedidos, muchas empresas intentan recuperar su ventaja competitiva transformando la producción en masa en fabricación flexible. Shivanand, Benal y Koti (2006) definen un sistema de fabricación flexible (FMS) como un grupo de estaciones de trabajo y sistemas de almacenamiento interconectados por un sistema automatizado de manipulación de materiales y controlado por un sistema de control informático integrado. Un sistema de este tipo se caracteriza por varias características complejas, como grandes variaciones de productos, patrones aleatorios de flujos de materiales y una demanda estocástica en la que los sistemas tradicionales de manipulación de materiales, como las cintas transportadoras, ya no pueden hacer frente a los retos que supone mover los productos entre las estaciones de trabajo de todo el sistema.
Los AGV pueden aumentar significativamente la flexibilidad de un sistema de manipulación de materiales y tomar rutas eficientes para entregar el trabajo en curso (WIP) en función de las secuencias de procesamiento del producto. Sin embargo, la lenta velocidad de desplazamiento, el importante tiempo de carga y descarga y la capacidad limitada de los AGV pueden limitar la capacidad de producción de los sistemas de fabricación. Así, un FMS con una alta intensidad de tráfico puede requerir un gran número de AGV para lograr un flujo y una distribución eficientes de los materiales. Además, una flota de AGV de gran tamaño implica un elevado coste de capital para los vehículos, el mantenimiento de los AGV, problemas de congestión del tráfico y requisitos de espacio.
Para reducir el número de AGV necesarios, una alternativa es implantar AGV de carga múltiple. Los AGVs de carga múltiple pueden ayudar a un FMS a alcanzar un alto nivel de rendimiento con una flota más pequeña en comparación con los AGVs de carga única (Ozden 1988). Otras ventajas de los AGV de carga múltiple son una mejor utilización de los AGV y una mejor utilización de las máquinas (Bilge y Tanchoco 1997). El mayor reto de la gestión de AGVs de carga múltiple es que los espacios de carga adicionales aumentarán los estados de toma de decisiones de los AGVs. Ho y Chien (2006) observan que un AGV de carga única sólo tiene estados vacío y cargado, mientras que un AGV de carga múltiple puede estar vacío, parcialmente cargado y totalmente cargado. Además, definen cuatro cuestiones principales relacionadas con la gestión de los AGV de carga múltiple:
- Determinación de tareas: Determinar si el siguiente movimiento del AGV debe ser recoger nuevas cargas o dejar las cargas transportadas cuando el vehículo está parcialmente cargado.
- Entrega-despacho: Determina qué carga transportada debe dejarse primero cuando el siguiente movimiento del AGV es la entrega.
- Recogida-despacho: Determina qué punto de recogida debe visitar el AGV en el siguiente movimiento de recogida.
- Selección de carga: Determina qué carga del buffer de salida debe ser recogida cuando un AGV llega a un punto de recogida.
El objetivo de esta investigación es desarrollar una regla de determinación de tareas que permita a los AGVs de carga múltiple utilizar el espacio o espacios vacíos cuando están parcialmente cargados con el objetivo de maximizar el rendimiento del sistema y minimizar el tiempo medio en sistema de las piezas en un FMS. En concreto, la estrategia propuesta, que denominamos Recogida o Entrega en Ruta (PDER), permite a un vehículo parcialmente cargado que viaja a un destino de entrega recoger y/o entregar cargas que, de otro modo, el vehículo pasaría de largo en ruta hacia el destino original.
El resto del artículo está organizado de la siguiente manera: en la sección 2 se presenta un resumen de trabajos relacionados; en la sección 3 se explican los detalles de la regla PDER propuesta; en la sección 4 se presenta un experimento de simulación para comparar reglas de despacho alternativas bajo dos configuraciones de sistemas FMS; y finalmente, en la sección 5 se discuten nuestras conclusiones.
2 Resumen de trabajos relacionados
Existe una cantidad relativamente grande de trabajos en el área de los algoritmos de despacho de AGVs. Dos extensos estudios de revisión incluyen LeAnh y Koster (2006) que presenta un estudio exhaustivo de los desafíos y enfoques de la gestión de AGV y Fazlollahtabar y SaidiMehrabad (2015) que revisa las estrategias existentes para la programación de AGV, el despacho y los problemas de enrutamiento. Muchos autores se centran en el problema de recogida-despacho para AGVs de carga única. Algunas reglas comunes de recogida-despacho incluyen ShortestTravel-Distance (STD), Modified-First-Come-First-Serve (MFCFS), Maximum-Output-Queue-Size (MOQZ), Unit-Load-Shop-Arrival-Time (ULSAT) (Egbelu y Tanchoco, 1984). Otros investigadores han demostrado que, en determinadas circunstancias, los algoritmos de despacho multiatributo pueden superar a las reglas de atributo único (Jeong y Randhawa, 2001; Bilge et al., 2006; Guan y Dai, 2009; Caridá, Morandin y Tuma, 2015).
Azimi, Haleh y Alidoost (2010) desarrollan un método difuso de toma de decisiones multiatributo (MADM) para evaluar la estrategia de control de vehículos AGV de carga múltiple, que tiene en cuenta diez criterios de rendimiento, como el rendimiento del sistema, el tiempo medio de flujo de las piezas, la longitud media de las colas en los puntos de recogida y entrega, entre otros. Ho y Chien (2006) comparan tres reglas para manejar el problema de determinación de tareas para AGVs de carga múltiple, que son las reglas Entrega-Tarea-Primero (DTF), Recogida-Tarea-Primero (PTF), y Relación de Carga (LR). Una regla DTF sugiere que un AGV siempre debe optar por dejar la(s) carga(s) restante(s) cuando está parcialmente cargado. Con una regla PTF, el AGV siempre debe realizar primero las tareas de recogida, incluso cuando tanto la entrega como la recogida estén a su disposición. A diferencia de las reglas DTF o PTF, que dan mayor prioridad a las tareas de entrega o recogida, la regla LR determina la siguiente tarea del AGV en función de la relación de carga del vehículo. Los resultados muestran que la regla DTF suele superar a las reglas PTF y LR en términos de rendimiento del sistema y retraso medio de las piezas.
En este trabajo, nos basamos en los conocimientos adquiridos a través de los estudios anteriores y diseñamos una regla (PDER) para abordar las estrategias de recogida y entrega empleadas cuando el AGV está parcialmente cargado y en ruta hacia un destino, en un intento de aumentar el rendimiento del sistema.
La solución
3 Regla de recogida o entrega en ruta (PDER)
El objetivo esencial de la regla de recogida o entrega en ruta (PDER) es maximizar la utilización de los espacios de carga en los AGV de carga múltiple. Así, la regla PDER permite a un AGV parcialmente cargado recoger cargas adicionales en su camino hacia el siguiente destino. Después de que un AGV de carga múltiple complete todas las acciones necesarias en un punto de recogida o entrega y quede parcialmente cargado, el AGV busca una nueva asignación entre los trabajos cuyos puntos de recogida estén geográficamente situados en el camino más corto entre la ubicación actual del AGV y el siguiente destino. Estos trabajos se denominan trabajos de bajo coste porque es muy conveniente para el AGV recogerlos. Si existen uno o varios trabajos de bajo coste, el AGV los recogerá/dejará en la ruta hacia el destino original.
El algoritmo PDER trabaja en conjunto con una regla de despacho de recogida especificada para controlar las acciones de los AGVs de carga múltiple. El algoritmo PDER se presenta en la Figura 1, en la que se utiliza la siguiente notación:
𝑖 un trabajo de transporte (carga) en el sistema.
𝐼 lista de espera de todos los trabajos no asignados en el sistema.
𝑉 un AGV en el sistema.
𝐷𝑉 lista de destinos del AGV, 𝑉, correspondientes a sus trabajos asignados y transportados.
𝑃𝑉 lista de puntos de recogida situados entre la ubicación actual del AGV y su próximo destino.
𝐼𝑉 conjunto de trabajos de bajo coste en espera en los puntos de recogida 𝑃𝑉 donde 𝐼𝑉 ⊆ 𝐼. El algoritmo PDER se inicia en el sistema cuando se produce un evento iniciado por el centro de trabajo o un evento iniciado por el vehículo.
Un evento iniciado por el centro de trabajo se produce cuando una carga genera una nueva solicitud para ser transportada a la siguiente estación de trabajo en función de su secuencia de procesamiento. Cuando una pieza se termina en una estación de trabajo, se genera un trabajo de transporte 𝑖. Si ninguno de los AGV está inactivo en ese momento, el trabajo 𝑖 se guardará en la lista de espera 𝐼. Si sólo hay un vehículo inactivo 𝑉, el trabajo 𝑖 se asignará a 𝑉. Si hay más de un AGV inactivo, los AGV competirán por el trabajo 𝑖 basándose en una regla iniciada por el centro de trabajo. Algunas reglas comunes incluyen el Vehículo Más Cercano (NV), el Vehículo Más Largo en Ralentí (LIV), y el Vehículo Menos Utilizado (LUV) (Egbelu y Tanchoco 1984).
Un evento iniciado por un vehículo se produce cuando un AGV llega a un punto de recogida o entrega. El AGV realizará primero la tarea de recogida o entrega predeterminada para el trabajo asignado o transportado, respectivamente. Una vez que el AGV completa la tarea predeterminada, se encontrará en una de las tres condiciones:
- Caso 1: 𝑉 no transporta ninguna carga ni está asignado a ningún trabajo. En este caso, si la lista de espera I no está vacía, 𝑉 utilizará una regla de recogida-despacho para determinar el siguiente punto de recogida y una regla de selección de carga para decidir el siguiente trabajo de recogida. En caso contrario, 𝑉 aparcará en el aparcamiento más cercano.
- Caso 2: 𝑉 tiene asignada o transporta una o varias cargas. El AGV definirá primero su próximo destino, que es el punto de recogida o entrega más cercano en su lista de destinos 𝐷𝑉. Si el número total de trabajos asignados y transportados por 𝑉 es inferior a la capacidad del vehículo, 𝑉 definirá su lista de puntos de recogida de bajo coste 𝑃𝑉 y su lista de trabajos de bajo coste 𝐼𝑉. Si 𝐼𝑉 no está vacío, 𝑉 utilizará una regla de recogida-despacho para determinar el punto de recogida de bajo coste que tiene la mayor prioridad. Un trabajo de bajo coste en espera en este punto de recogida será seleccionado por 𝑉 basándose en una regla de selección de carga. Si 𝐼𝑉 está vacío, 𝑉 pasará al siguiente destino.
- Caso 3: 𝑉 tiene asignada o transporta cargas iguales a su capacidad. El AGV definirá y se moverá al siguiente destino.
En los casos 1 y 2, después de que el trabajo i se asigne a 𝑉 y se elimine de la lista de espera I, los estados posteriores de 𝑉 seguirán el caso 2 o el caso 3. En otras palabras, 𝑉 no abandonará el punto de recogida o entrega a menos que el vehículo esté completamente asignado ( 𝐼 en el Caso 1 está vacío o 𝐼𝑉 en el Caso 2 está vacío.) Como el siguiente destino se define como el punto de recogida o entrega más cercano en la lista de destinos de 𝑉, las decisiones de entrega-despacho siempre siguen la regla STD.

Análisis de la simulación y experimentación
En esta sección, presentamos un experimento basado en simulación para evaluar la eficacia de la regla de determinación de tareas del PDER junto con cuatro reglas alternativas de recogida-despacho. El PDER se compara con la regla de determinación de tareas Delivery-Task-First (DTF) (Ho y Chien 2006) en el contexto de dos configuraciones de sistemas FMS en las que variamos el número de AGVs en el sistema, así como las capacidades de los AGVs. Se lleva a cabo una simulación-experimento para comparar el rendimiento de las combinaciones de reglas en las distintas configuraciones del sistema basándose en medidas de rendimiento que incluyen el rendimiento del sistema y el tiempo medio en el sistema.
Configuraciones FMS
Consideramos dos configuraciones de Sistema de Fabricación Flexible, FMS 1 y FMS 2. Ambos sistemas operan bajo un concepto pull, de forma que una nueva pieza con un tipo de pieza aleatorio entrará en el sistema cuando la longitud de la cola de la estación de entrada sea menor que su capacidad. En ambas configuraciones, los tiempos de carga y descarga de un AGV son de 15 segundos por pieza, y su velocidad de desplazamiento es de 2 millas por hora.
Configuración FMS 1 (FMS 1)
En la figura 2 se muestra la disposición de la primera configuración FMS (FMS 1). FMS 1 tiene una disposición de planta de un solo bucle, que consta de 8 estaciones de trabajo conectadas con rutas unidireccionales, y produce cinco tipos de piezas. La capacidad del buffer de salida de la estación de entrada es de 12. Después de que un AGV recoja una pieza del buffer de salida, una nueva pieza con un tipo de pieza aleatorio fluirá hacia el sistema basándose en los porcentajes de volumen de producción de la Tabla 1. Además, la Tabla 1 muestra la secuencia de procesamiento para cada tipo de pieza, así como el tiempo medio de procesamiento. Suponemos que el tiempo de procesamiento de una pieza en una estación de trabajo sigue una distribución exponencial. Una pieza terminada saldrá del sistema desde la estación de Salida.

4.2.1 Configuración FMS 2 (FMS 2)
La disposición de la segunda configuración FMS (FMS 2) se muestra en la Figura 3 y se basa en la disposición utilizada por Ho y Chien (2006). El sistema consta de 10 estaciones de trabajo y produce seis tipos de piezas diferentes. La tabla 2 muestra la secuencia de procesamiento y el porcentaje de volumen (muestreado aleatoriamente) de cada tipo de pieza. El tiempo de procesamiento de los diferentes tipos de piezas en cada estación de trabajo sigue la misma distribución normal que se muestra en la Tabla 3.

4.3 Reglas de control del AGV
Para los experimentos, utilizamos varios tipos de reglas de control AGV, incluyendo una regla iniciada por el centro de trabajo, reglas de despacho de recogida, una regla de despacho de entrega y una regla de selección de carga.
Una regla iniciada por el centro de trabajo se aplica cuando se genera una nueva solicitud de transporte y hay más de un AGV inactivo. La tarea consiste en determinar qué vehículo inactivo debe recoger la carga. Basándonos en los resultados de Egbelu y Tanchoco (1984), aplicamos la regla del vehículo más cercano (NV). Para seleccionar un vehículo, cada AGV encontrará el camino más corto hacia el punto de recogida del trabajo. Se asignará el trabajo al AGV que tenga la menor distancia recorrida hasta el punto de recogida.
Junto con la determinación de la tarea se utilizan cuatro reglas de recogida-despacho. Una regla de recogida-despacho se utiliza para determinar qué punto de recogida debe visitar el AGV. Las cuatro reglas consideradas son las de mayor tiempo en el sistema (LTIS), mayor tiempo de espera en el punto de recogida (LWTPT), menor distancia de recorrido (STD) y mayor longitud de cola (GQL). Para más información sobre estas reglas, véase Ho y Liu (2006).
Una regla de entrega-despacho se utiliza para determinar qué carga debe entregarse primero cuando un AGV transporta más de una carga. En este estudio, se emplea una regla de distancia más corta (SD) para el despacho de entregas; véase Ho y Chien (2006). Se utiliza una regla de selección de carga para determinar qué carga debe recogerse en un punto de recogida. En este estudio, utilizamos la regla del primero en entrar en la cola, primero en salir (FIQFO), según la cual una pieza con mayor tiempo de espera en la cola tendrá mayor prioridad (Ho y Liu, 2006). Con una regla de determinación de tareas DTF, la regla de selección de carga se invocará cuando el AGV alcance el punto de recogida que decidió visitar. El AGV continuará cargando piezas basándose en la regla de selección de carga hasta que esté completamente cargado o la cola de salida esté vacía. Con una regla de determinación de tareas PDER, la regla de selección de carga se invocará durante el proceso de asignación de tareas y determinará a qué tarea de bajo coste debe asignarse el AGV.
4.4 Simulación Configuración experimental
Se construyó un modelo de simulación de los dos sistemas FMS considerados utilizando el software de simulación Simio (Simio 2017). Se han realizado varias modificaciones/adiciones relativamente significativas a la lógica estándar de enrutamiento de vehículos de Simio para permitir la implementación y ejecución de las diversas reglas de control de vehículos, incluida la regla de determinación de tareas PDER -para más detalles, véase Li (2017).
Los experimentos basados en simulaciones comparan el rendimiento de las reglas de determinación de tareas PDER y DTF emparejadas con cuatro reglas alternativas de recogida-despacho en dos configuraciones FMS. Los otros factores considerados incluyen el tamaño de la flota de AGV, que oscila entre 1 y 4 vehículos, y los tipos de vehículos incluyen AGV de carga doble y triple, lo que da como resultado un total de 128 escenarios de prueba. Los factores experimentales y sus niveles se presentan en la Tabla 4. Las principales medidas de rendimiento consideradas para este experimento son el rendimiento medio y el tiempo medio en el sistema.
Los experimentos de simulación están configurados para ejecutar 20 réplicas de cada combinación de factores, consistentes en 500 horas de operaciones continuas que incluyen un periodo de calentamiento de 6 y 12 horas para FMS 1 y FMS 2, respectivamente.

4.5 Análisis de los resultados de los experimentos de simulación
Para cada combinación de tratamiento de los experimentos de simulación, se registran estadísticas sobre el rendimiento y el tiempo en el sistema. El rendimiento medio de FMS 1 y FMS 2 se muestra en las figuras 4 y 5, respectivamente.


Como punto de referencia, se ha ejecutado una configuración de simulación que supone una manipulación instantánea del material para establecer un límite superior de rendimiento. El límite superior es de 6.000 piezas para el FMS 1 y de 9.800 piezas para el FMS 2. A la vista de los resultados presentados en las Figuras 4 y 5, observamos varios casos en los que el sistema está por debajo de su capacidad (FMS 1 con un AGV independientemente de la capacidad del AGV; y FMS 2 con uno o dos AGV de doble carga, y un AGV de triple carga). Además, en el FMS 1 cuando se utilizan cuatro AGV y en el FMS 2 cuando se utilizan cuatro AGV de doble carga o tres o cuatro AGV de triple carga, el sistema pasa a estar sobrecapacitado en términos de AGV. Es decir, hay suficiente capacidad de vehículos como para que las reglas de control de AGVs no tengan un impacto significativo (a 𝛼 ≤ 0,05) en el rendimiento. Por lo tanto, centramos nuestro análisis en los escenarios de la Tabla 5.
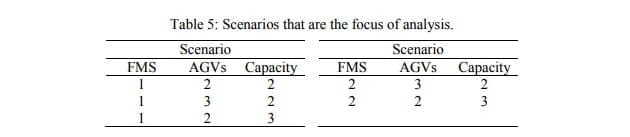
Las tablas 6 y 7 muestran la media y la desviación estándar del rendimiento de los escenarios seleccionados en FMS 1 y FMS 2, respectivamente. Para cada escenario, se realiza una prueba de comparación de medias múltiples de Tukey a un nivel de significación de 0,05 para comparar el rendimiento medio con cada par de reglas de control de AGV. Los valores de rendimiento sombreados indican que la combinación de reglas correspondiente produce el mayor rendimiento en el escenario. Cuando hay varios valores sombreados para un escenario concreto, las medias están en el grupo más alto de rendimiento medio, pero las medias no son significativamente diferentes entre sí.

En la Tabla 6 observamos que el mayor rendimiento siempre se consigue utilizando las reglas STD con PDER. Cuando hay 3 AGVs de carga doble y 2 AGVs de carga triple, cualquier regla de recogida-despacho puede alcanzar el rendimiento más alto siempre que esté acoplada a una regla de determinación de tareas PDER. Si se utiliza la misma regla de recogida-despacho, PDER supera a DTF en términos de rendimiento. Del mismo modo, en la Tabla 7, cuando se utilizan 3 AGVs de doble carga o 2 de triple carga, el mayor rendimiento se consigue siempre con una regla PDER. Cuando se utiliza la misma regla de recogida-despacho en estos dos escenarios, la regla PDER produce un mayor rendimiento.
Además del rendimiento, analizamos el rendimiento de las reglas de control de los AGV con respecto al tiempo medio que las piezas pasan en el sistema. Las tablas 8 y 9 resumen la media y la desviación estándar del tiempo medio en el sistema para cada uno de los escenarios seleccionados en FMS 1 y FMS 2, respectivamente. Realizamos una prueba análoga de comparación de medias múltiples sobre estas medias y sombreamos el grupo de mayor rendimiento para cada escenario. En la Tabla 8 observamos que el menor tiempo medio en el sistema se consigue con un STD con regla PDER. Cuando se utiliza la misma regla de recogida-despacho, el PDER supera a las reglas DTF en la mayoría de los escenarios. La única excepción es cuando se emplea la regla LTIS con DTF en 2 AGVs de doble carga. En la Tabla 9 el menor tiempo medio del sistema se consigue con una regla STD con PDER. Cuando se utilizan las reglas de recogida-despacho STD, LWTPT y GQL, la regla PDER supera a la regla STD.

El impacto empresarial
4.6 Discusión de los resultados
En general, la regla PDER supera a la regla DTF en términos de rendimiento del sistema. Cuando se utiliza la misma regla de recogida-despacho, el PDER suele ofrecer un mayor rendimiento. La única excepción es cuando se utilizan 2 AGVs de doble carga en el segundo FMS, el GQL con PDER y el GQL con DTF empatan en el primer puesto. Se observa que la regla PDER tiene un menor impacto en el rendimiento en el FMS 2. Como la regla PDER permite a un AGV recoger trabajos adicionales en su camino hacia el siguiente destino, las probabilidades de tener un AGV vacío son muy pequeñas. Así, en lugar de ser asignado al trabajo con la prioridad más alta del sistema, un AGV con la regla PDER suele seleccionar un trabajo de bajo coste que sólo tiene la prioridad más alta en la ruta actual del AGV hacia el siguiente destino. En otras palabras, en lugar de asignar el trabajo con la prioridad más alta del sistema, un AGV suele elegir el trabajo que es relativamente importante y más cómodo de recoger. Este problema se mitiga en FMS 1, ya que sólo hay una ruta que conecta todas las estaciones de trabajo, de modo que el número de veces que pasa por cada estación de trabajo se distribuye de forma más uniforme.
La regla PDER también tiene un rendimiento excepcional en cuanto al tiempo medio que pasan las piezas en el sistema. Cuando se utiliza la misma regla de despacho de recogida, la regla PDER supera a la regla DTF excepto en el caso LTIS. El objetivo esencial de la regla LTIS es minimizar el tiempo en el sistema de las piezas. Una pieza que espera en el punto de recogida de la estación de entrada siempre tiene un tiempo en el sistema menor que las piezas que se encuentran en las memorias intermedias de salida de las estaciones de trabajo. Así, los AGVs conducirán al sistema de fabricación a centrarse en completar las piezas que ya han salido de la estación de entrada. Este efecto garantiza la minimización del tiempo en el sistema, pero reduce el número de piezas introducidas en el sistema, limitando así el rendimiento.
Por último, observamos que la regla PDER funciona muy bien tanto en rendimiento como en tiempo en el sistema cuando se combina con la regla STD. Dado que la regla STD se centra en minimizar los desplazamientos muertos y que la regla PDER reduce el problema del AGV a la recogida de piezas de las estaciones de trabajo anteriores mientras pasa junto a las piezas posteriores que están listas para seguir avanzando. Como resultado, la regla PDER tiene el potencial de aumentar significativamente la productividad de los sistemas FMS que utilizan AGV de carga múltiple.
5 Conclusiones
En este artículo se presenta una regla de determinación de tareas de recogida o entrega en ruta para vehículos AGV de carga múltiple. Se realiza un experimento basado en simulación para comparar la regla PDER y la regla DTF en dos configuraciones de sistema con diferentes tamaños de flota y tipos de AGV. A través de este estudio, hemos demostrado el fuerte potencial de la utilización de la regla PDER para mejorar significativamente la productividad que se puede lograr en un FMS utilizando AGVs de capacidad múltiple. Basándonos en este trabajo inicial, planeamos realizar un análisis más profundo para determinar las características de un FMS en las que el uso de la regla PDER será más ventajoso.