Scheduling-Probleme sind in der Regel groß und komplex und werden mathematisch in eine Gruppe von Problemen eingeordnet, die als NP-Hard (non-deterministic polynomial-time hard) bezeichnet werden. Nicht-mathematisch ausgedrückt handelt es sich dabei um die härtesten der harten Rechenprobleme, für die es keine praktischen optimalen Algorithmen gibt. Infolgedessen greifen alle Scheduling-Lösungen auf Heuristiken zurück, und keine führt zu einer optimalen Lösung (unabhängig davon, was die Anbieter vorschlagen). Das Beste, was man sich bei dieser Problemklasse erhoffen kann, ist eine "gute" Lösung, die besser und einfacher zu erhalten ist als der Versuch, eine Lösung manuell mit Excel oder einer Plantafel zu generieren. In diesem White Paper werden wir kurz die optimierungs- und simulationsbasierten Ansätze für das Planungsproblem vergleichen.
Optimierungsbasierte Terminplanung
Trotz ihres Namens verwenden optimierungsbasierte Planungstools heuristische Ansätze, die versuchen, eine Lösung zu generieren, die eine Liste mathematischer Beschränkungen erfüllt und außerdem eine angemessene Leistung in Bezug auf Schlüsselkennzahlen wie die Anzahl verspäteter Aufträge bietet. Es gibt keine Garantien für die Qualität des Plans im Vergleich zu anderen möglichen Plänen oder die Rechenzeit, die erforderlich sein könnte, um zu einem machbaren oder guten Plan zu gelangen.Diese Werkzeuge versuchen in der Regel zunächst, einen realisierbaren Zeitplan zu erstellen und diesen dann zu verbessern, indem sie Variationen des realisierbaren Zeitplans untersuchen, um die Leistungskennzahlen zu verbessern. Die Qualität der endgültigen Antwort wird dadurch begrenzt, wie viel Zeit dem Algorithmus für die Suche nach besseren Lösungen eingeräumt wird. In der Regel wird ein Zeitlimit (z. B. eine Stunde) für die algorithmische Suche festgelegt, und die beste Lösung, die während dieser Suchzeit gefunden wird, wird als Zeitplan verwendet.
Der Algorithmus (manchmal auch als Solver bezeichnet) sucht auf der Grundlage eines mathematischen Modells des Produktionssystems, das bei der Installation der Software konfiguriert wird. Das mathematische Modell beschreibt die Ressourcenbeschränkungen des Systems und kann in einigen Fällen Details wie sequenzabhängige Rüstzeiten für eine Ressource enthalten. Dieses mathematische Modell hat jedoch eine begrenzte Struktur und kann nicht alle Beschränkungen erfassen, z. B. komplexe Materialhandhabung wie die Bewegung von FTS oder mehrere überlappende Kräne.Selbst im Rahmen der Möglichkeiten des mathematischen Modells ist es oft notwendig, Details der Anlage (z. B. sequenzabhängige Rüstzeiten) wegzulassen, um die erforderliche Rechenzeit für den Suchalgorithmus in akzeptablen Grenzen zu halten.Das Problem dabei ist, dass die sich daraus ergebenden Pläne im tatsächlichen System aufgrund der vom Planungswerkzeug ignorierten Einschränkungen oft nicht durchführbar sind. Aufgrund der Einschränkungen des mathematischen Modells funktionieren optimierungsbasierte Werkzeuge am besten bei einfachen, überschaubaren Anwendungen mit wenigen komplexen Einschränkungen.
Eines der bekanntesten optimierungsbasierten Scheduling-Tools ist PP/DS von SAP. Dieses Tool bietet zwei alternative Solver für die Generierung von Lösungen für das mathematische Modell. Der erste Solver ist ein beschränkungsbasierter Programmieralgorithmus, der die beste Wahl für die Suche nach einer machbaren Lösung ist, wenn viele komplexe Beschränkungen vorhanden sind. Allerdings ist dieser Solver weniger effektiv, um gute Lösungen zu finden.Der zweite Solver ist ein genetischer Algorithmus, der bessere Lösungen liefern kann, solange nicht zu viele Einschränkungen vorhanden sind. Der Erfolg eines dieser Solver, eine vernünftige Lösung innerhalb der Grenzen einer praktischen Suchzeit zu liefern, hängt von der Komplexität des mathematischen Modells und seiner ungefähren Anpassung an das tatsächliche System ab.
Da die Solver oft nicht in der Lage sind, das Problem in praktischer Zeit zu lösen, stellt PP/DS auch eine Reihe einfacher heuristischer Algorithmen zur Verfügung, um einen realisierbaren Zeitplan zu erstellen. Die meisten PP/DS-Implementierungen verwenden diese einfachen Heuristiken und machen keinen Gebrauch von den beiden verfügbaren Solvern.
Simulationsbasierte Terminplanung
Bei der simulationsbasierten Planung werden die mathematischen Randbedingungen durch ein Simulationsmodell der Anlage ersetzt. Einige simulationsbasierte Werkzeuge (z. B. Preactor) verwenden ein fest kodiertes Simulationsmodell der Anlage, das mit Hilfe einer Datenbank konfiguriert wird. Diese Werkzeuge sind auf Anwendungen beschränkt, bei denen das datengesteuerte Modell eine angemessene Anpassung an die Anlage darstellt. Andere simulationsbasierte Werkzeuge (z. B. Simio) unterstützen sowohl einen datengesteuerten Ansatz (für Standardanwendungen) als auch die benutzerdefinierte Erstellung des zugrundeliegenden Simulationsmodells der Anlage (für komplexe Anwendungen). Dieser letztere Ansatz bietet vollständige Flexibilität bei der Erfassung der detaillierten Prozessbeschränkungen im System und eine größere Transparenz im Prozess der Zeitplanerstellung.
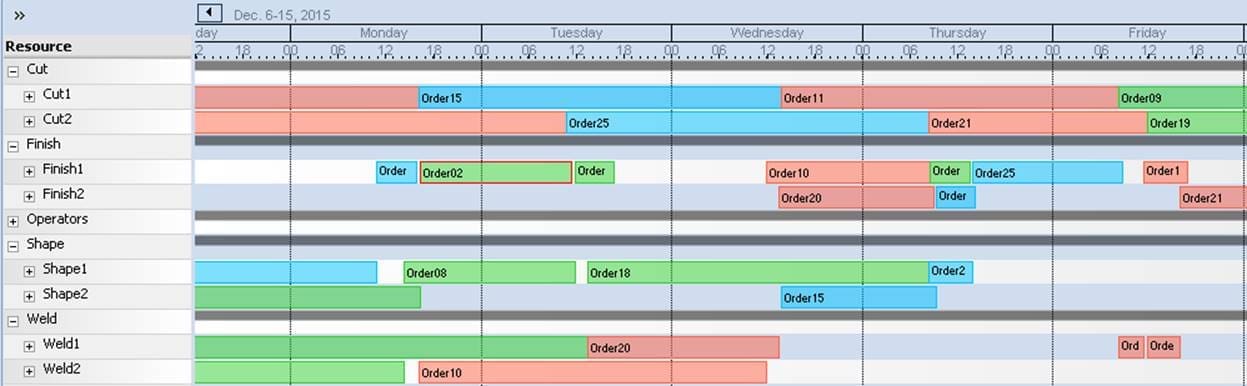
In einem simulationsbasierten Tool wird der Zeitplan durch die Simulation des Arbeitsflusses durch das Modell der Anlage erstellt. Während sich die Aufträge durch die simulierte Anlage bewegen, stehen sie in einer Warteschlange vor den Maschinen und warten darauf, dass Material, Werkzeuge und Bediener verfügbar sind, bevor sie fortfahren. Die Bewegung der Arbeit durch das simulierte Anlagenmodell wird aufgezeichnet und in Form von Gantt-Diagrammen dargestellt, die den Fluss jedes Auftrags durch das System zeigen.Das Ressourcen-Gantt-Diagramm zeigt die Auslastung jedes Auftrags auf jeder Ressource im System, und das Auftrags-Gantt-Diagramm zeigt den Fluss jedes Auftrags über die Ressourcen, die er während der Bearbeitung in Anspruch nimmt. Die folgende Abbildung zeigt ein einfaches Ressourcen-Gantt-Diagramm, das vom simulationsbasierten Scheduler von Simio generiert wurde. Dieses Gantt-Diagramm ist interaktiv und ermöglicht es dem Scheduler, Aufträge innerhalb und zwischen den Maschinen auf dem Gantt-Diagramm zu ziehen und abzulegen. Dies ermöglicht dem Scheduler, Anpassungen am Zeitplan vorzunehmen, der vom Simulationsmodell generiert wurde.
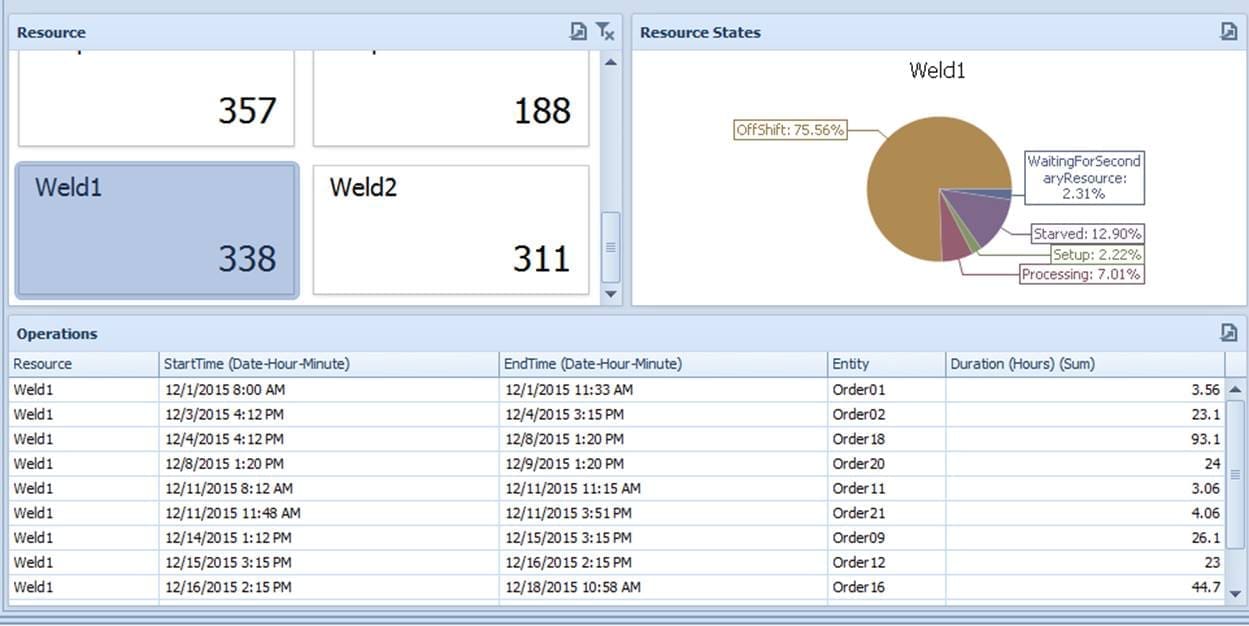
Zusätzlich zu den interaktiven Gantt-Diagrammen kann Simio auch detaillierte Berichte und interaktive Dashboards bereitstellen, die den geplanten Arbeitsfluss in der Anlage zusammenfassen. Dazu gehören Standardberichte/Dashboards zu den Ressourcen, Materialien und Beschränkungen im System sowie benutzerdefinierte Berichte/Dashboards für bestimmte Anwendungen. Die Planungsergebnisse können über das cloudbasierte Simio-Portal an mehrere Benutzer auf mobilen Geräten verteilt werden. Das folgende Beispiel zeigt ein interaktives Dashboard, das den Maschinenzustand und die zu erledigende Arbeit für die Maschinen in der Anlage darstellt.
In Simio kann der Arbeitsfluss durch das System zur Erstellung des Zeitplans auch in einer detailgetreuen 3D-Animation betrachtet werden (siehe unten). Dies macht den Prozess der Zeitplanerstellung in hohem Maße transparent. Die folgende Abbildung zeigt einen Schnappschuss der animierten Zeitplanerstellung für den simulationsbasierten Simio-Scheduler.

Die Optimierung des Zeitplans erfolgt durch die Anwendung heuristischer Planungsregeln bei den Entscheidungen, die während der Ausführung des Modells getroffen werden. Wenn beispielsweise eine Maschine in den Leerlauf geht, kann sie wählen, welchen Auftrag sie als nächstes bearbeiten soll. Simulationsbasierte Planungswerkzeuge bieten in der Regel einen umfangreichen Satz von Regeln für diese Auswahl.In der Prozessindustrie kann beispielsweise eine Regel festgelegt werden, die die sequenzabhängigen Rüstzeiten/-kosten an einer bestimmten Arbeitsstation minimiert. Es gibt auch Regeln, die sich auf andere wichtige Leistungskennzahlen konzentrieren, wie die Minimierung von Verspätungen, die Maximierung des Durchsatzes oder die Minimierung der Leerlaufzeit an einer Engpassmaschine. Es ist auch einfach, benutzerdefinierte Regeln für anwendungsspezifische Leistungskennzahlen zu erstellen.
Ein entscheidender Vorteil des simulationsbasierten Planungsansatzes besteht darin, dass im Falle eines störenden Ereignisses (z. B. eines Maschinenausfalls) innerhalb weniger Sekunden oder Minuten ein neuer Plan erstellt werden kann (im Vergleich zu Stunden bei einem optimierungsbasierten Tool). Die deutlich höhere Geschwindigkeit simulationsbasierter Planungstools macht sie zur ersten Wahl in hochdynamischen Umgebungen, in denen die Notwendigkeit einer Neuplanung häufig auftritt.
Ein weiterer entscheidender Vorteil des simulationsbasierten Ansatzes ist die Fähigkeit, die detaillierten Einschränkungen des Systems in einem realitätsgetreuen Anlagenmodell zu erfassen. Dies führt zu realistischen und ausführbaren Plänen, die ohne Anpassungen durch die Mitarbeiter in der Produktion umgesetzt werden können. Wenn ein Planungswerkzeug nicht realisierbare Pläne erzeugt, die Änderungen in der Produktion erfordern, können die Mitarbeiter "lokale" Entscheidungen treffen, die einen nicht optimalen Plan ergeben.
Ein kritisches Problem des optimierungsbasierten Planungsansatzes besteht darin, dass er voraussetzt, dass alle Daten vollständig bekannt und deterministisch sind. So müssen beispielsweise alle Bearbeitungszeiten feststehen, und es darf keine unerwarteten Ereignisse oder Verzögerungen geben. Leider ist dies der "glückliche Weg" durch das System, und der daraus resultierende Zeitplan ist von Natur aus optimistisch und unterscheidet sich in der Regel stark von dem, was in der realen Anlage geschieht. Es kommt häufig vor, dass ein anfangs realisierbarer Zeitplan im Laufe der Zeit nicht mehr realisierbar ist, da Abweichungen und ungeplante Ereignisse die Leistung beeinträchtigen. Es ist normal, dass große Diskrepanzen zwischen den prognostizierten Zeitplänen und der tatsächlichen Leistung auftreten. Die simulationsbasierte risikobasierte Planung und Terminierung (RPS) von Simio erweitert die herkömmliche Terminplanung, um die in nahezu jedem Produktionssystem auftretenden Schwankungen vollständig zu berücksichtigen, und liefert dem Planer die notwendigen Informationen, um Risiken und Unsicherheiten im Vorfeld zu minimieren.
PDF-Version herunterladen