A função que a variação desempenha na criação de congestionamentos e atrasos na produção está bem documentada na literatura, mas geralmente é ignorada no planejamento e na programação diários da produção. As ferramentas de planejamento e programação avançados (APS) geram programações ignorando completamente a variação no sistema. Em alguns casos, horas de computação são gastas para gerar um cronograma; no entanto, a suposição básica de tempos determinísticos torna esse cronograma irrealista e otimista desde o início. Ao ignorar a variação, as ferramentas APS geram cronogramas que prometem mais do que podem ser entregues.
Para ilustrar esse ponto, usaremos um problema de programação muito simples, composto por uma única máquina. Em média, os trabalhos chegam à nossa máquina a cada hora e precisam de 55 minutos para serem processados. Eles são retirados duas horas depois de chegarem. Vamos analisar uma programação determinística simples para processar os três primeiros trabalhos em nosso sistema simples. O gráfico de Gantt para nossa programação com base em nossos tempos determinísticos é mostrado abaixo:
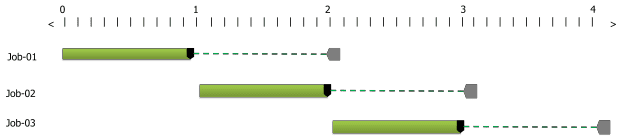
Observe que nossa programação parece boa; temos 92% de utilização da nossa máquina, um intervalo de 5 minutos entre cada trabalho de 55 minutos e todos os trabalhos têm uma folga de 65 minutos (indicada pela linha tracejada) incorporada à programação entre o tempo de conclusão planejado e a data de vencimento. Como temos uma folga que excede o nosso makespan para que o buffer leve em conta qualquer problema imprevisto, a princípio esse parece ser um cronograma robusto para nossos três trabalhos planejados.
Embora tenhamos criado esse cronograma presumindo todas as variações, os sistemas da vida real têm muitas fontes de variações. Por exemplo, os tempos de processamento normalmente variam de trabalho para trabalho, os componentes comprados ou fabricados podem chegar atrasados e atrasar o início de uma operação, as máquinas podem falhar e a equipe pode não aparecer. Esses são fatores que geralmente estão fora do nosso controle e degradam o cronograma, fazendo com que nosso desempenho fique aquém do planejado.
Vamos examinar agora o que acontece com o comportamento de longo prazo do nosso sistema simples de uma máquina quando adicionamos variabilidade nos tempos de chegada e processamento. Vamos supor que nossos dados representam valores esperados e que os tempos reais variam em torno desses valores. Para simplificar a análise matemática, assumiremos que tanto o tempo entre as chegadas de trabalho quanto o tempo de processamento na máquina são distribuídos exponencialmente. Com essa suposição, podemos usar a teoria básica de filas para calcular o comportamento de longo prazo do agendamento nessa única máquina.
Com a variação incorporada ao nosso sistema, uma simples análise de filas mostra que nosso sistema tem um desempenho muito ruim. Embora a utilização da máquina a longo prazo permaneça em 92%, o uso da máquina é altamente variável. O operador da máquina está frequentemente trabalhando por longos períodos sem intervalo e, em outros momentos, está faminto por trabalho com longos períodos de ociosidade. Cada trabalho que chega aguarda uma média de 10 horas antes de começar a ser processado, e apenas 16% dos nossos pedidos ficam prontos no prazo. Temos exatamente a mesma capacidade física de antes, só que nossos níveis de estoque e desempenho no prazo são terríveis. O que parece ser um plano viável (bom) com base em valores determinísticos, torna-se inviável (terrível) quando a variação é considerada.
Esse fenômeno explica a lacuna entre as ferramentas APS existentes e a realidade da programação de trabalho em um sistema de produção complexo, repleto de variações e incertezas. As programações geradas por ferramentas determinísticas não conseguem lidar adequadamente com as realidades do chão de fábrica.
O Simio Risk-based Planning and Scheduling (RPS) é a próxima geração de APS projetada especificamente para levar em conta o risco e a incerteza. O RPS usa um modelo de simulação de eventos discretos do sistema criado especificamente para capturar totalmente as restrições detalhadas e as variações do sistema. Em seguida, o RPS usa esse modelo de duas maneiras. A primeira é para gerar um cronograma/plano detalhado. Nesse caso, o modelo é executado em um modo puramente determinístico; as máquinas não quebram, os tempos de processo são sempre constantes, os materiais chegam no prazo, etc. Essa é a visão otimista assumida por todos os sistemas APS e produz um plano/cronograma determinístico. Depois que o cronograma é gerado, o RPS replica esse mesmo modelo de simulação com a variação ativada e executa uma análise probabilística para estimar os riscos subjacentes associados ao cronograma. As medidas de risco geradas pelo RPS incluem a probabilidade de atingir as metas definidas pelo usuário, bem como o desempenho esperado, pessimista e otimista do cronograma. Com o RPS, geramos um gráfico de Gantt semelhante ao anterior, só que agora adicionamos medidas de risco codificadas por cores que mostram nosso risco substancial de não cumprir as datas de vencimento planejadas.
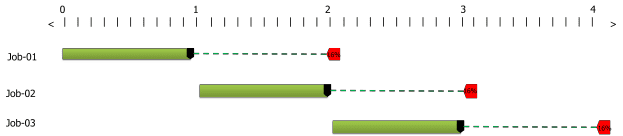
Embora uma folga no cronograma que exceda o makespan possa parecer "segura", vemos neste exemplo simples que nossos trabalhos correm um alto risco de atraso (apenas 16% de chance de ficarem prontos no prazo).
Ao fornecer visibilidade antecipada do risco inerente associado a um plano/cronograma específico, o Simio RPS fornece as informações necessárias para tomar medidas antecipadas no plano operacional para mitigar riscos e reduzir custos. O Simio RPS oferece uma visão realista do desempenho esperado do cronograma. Alternativas específicas, como horas extras ou expedição de materiais/componentes externos de fornecedores, podem ser comparadas em termos de seu impacto sobre os riscos de cumprimento das metas do cronograma e sobre os custos de mitigação desses riscos, proporcionando, assim, uma estratégia operacional que satisfaça o cliente a um custo mínimo.
Baixar a versão em PDF
C. Dennis Pegden, PhD. - Diretor de Produtos da Simio
Fundador e CPO do Simio. Dennis liderou o desenvolvimento das ferramentas de simulação SLAM, SIMAN, Arena e Simio. É coautor de três livros didáticos sobre simulação e publicou artigos em vários campos, incluindo programação e simulação.